

随着汽车的普及率越来越高,以及 AI 的蓬勃发展,汽车的智能化程度在不断提高,对于驾驶的安全性和舒适性也不断提高;毫米波雷达因其探测精度高,硬件体积小,不受天气环境的影响等优点被广泛采用。越来越多的车辆采用一个或者多个毫米波雷达来辅助驾驶员的驾驶操作,以提高驾驶的舒适性和安全性,避免交通事故的发生。
车载毫米波雷达的工作原理
车载毫米波雷达通过天线发射调频连续波(FMCW), 被目标反射后的回波再有雷达天线接收,回波与发射波之间存在一个时间差,利用这个时间差就可以计算出目标的距离。通过后端的数字信号处理器(DSP)分析发射信号与反射信号之间的频率差异,就可以基于多普勒原理,测量出目标相对于本车的运动速度。进一步通过多天线,多发多收以及相关算法的处理,可以实现对多个目标的距离、速度、角度的跟踪。
车载毫米波雷达通过天线发射调频连续波(FMCW), 被目标反射后的回波再有雷达天线接收,回波与发射波之间存在一个时间差,利用这个时间差就可以计算出目标的距离。通过后端的数字信号处理器(DSP)分析发射信号与反射信号之间的频率差异,就可以基于多普勒原理,测量出目标相对于本车的运动速度。进一步通过多天线,多发多收以及相关算法的处理,可以实现对多个目标的距离、速度、角度的跟踪。
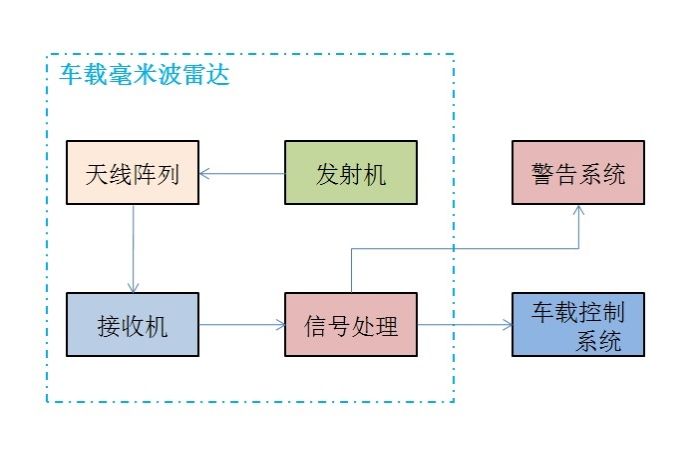
车载毫米波雷达原理图框图
车载毫米波雷达的应用
车载毫米波雷达按照不同的分类方式有着不同的划分方法。大家通常听到的可以安装工作频率,探测距离,主要功能等三种划分方式。
1)按照雷达的工作频率划分;可以主要分为两类:24GHz 雷达和 77GHz 雷达,由于 24GHz 雷达在带宽和使用范围上的受限,以及 77GHz 雷达的高带宽,高精度,体积小等优势,越来越多的国家将 77GHz 的频段划分给车载毫米波雷达使用,所以未来 77GHz 雷达会取代 24GHz 雷达。
2)按照雷达的探测距离划分:可分为长距雷达(LRR),中距雷达(MRR),短距雷达(SRR);分别应用在不同的场景实现不同的功能,也可以组合使用,或配合 ADAS 系统,实现多传感器的融合。
3)按照雷达功能划分可以区分不同应用的雷达,简单易懂。主要的常用功能雷达包括:BSD (Blind Spot Detection —— 盲点侦测系统),AEB (Autonomous Emergency Braking —— 自动紧急制动系统),FCW (Forward Collison Warming —— 前向碰撞警告系统),ACC (Adaptive Cruise Control —— 自适应巡航系统);本文以功能划分的不同应用雷达为主,介绍不同功能的车载毫米波雷达。下面的内容会详细介绍这四种功能的车载雷达。
车载毫米波雷达按照不同的分类方式有着不同的划分方法。大家通常听到的可以安装工作频率,探测距离,主要功能等三种划分方式。
1)按照雷达的工作频率划分;可以主要分为两类:24GHz 雷达和 77GHz 雷达,由于 24GHz 雷达在带宽和使用范围上的受限,以及 77GHz 雷达的高带宽,高精度,体积小等优势,越来越多的国家将 77GHz 的频段划分给车载毫米波雷达使用,所以未来 77GHz 雷达会取代 24GHz 雷达。
2)按照雷达的探测距离划分:可分为长距雷达(LRR),中距雷达(MRR),短距雷达(SRR);分别应用在不同的场景实现不同的功能,也可以组合使用,或配合 ADAS 系统,实现多传感器的融合。
3)按照雷达功能划分可以区分不同应用的雷达,简单易懂。主要的常用功能雷达包括:BSD (Blind Spot Detection —— 盲点侦测系统),AEB (Autonomous Emergency Braking —— 自动紧急制动系统),FCW (Forward Collison Warming —— 前向碰撞警告系统),ACC (Adaptive Cruise Control —— 自适应巡航系统);本文以功能划分的不同应用雷达为主,介绍不同功能的车载毫米波雷达。下面的内容会详细介绍这四种功能的车载雷达。
BSD (Blind Spot Detection —— 盲点侦测系统)
通过毫米波雷达探测两侧的后视镜盲区中的超车车辆,以提醒驾驶者,避免在变道过程中由于后视镜盲区导致的事故。
说到盲点侦测系统,首先要说说盲点是如何导致的?当你驾驶汽车是,汽车的每个不是玻璃的部分都会造成盲点。这意味着有大窗柱的车辆具有较大的盲点,较小的后视窗车辆具有较大盲点,而且车辆内的货物和乘客也会造成额外的盲点。另外一种大家普遍关注的盲点存在于驾驶员的周边视觉和后视镜发射区域之间的空间中。这一类型的盲点可以覆盖整个车辆,这就是为什么改变车道而不向左右两边看是非常危险的。BSD 的功能就是帮助驾驶人员解决这个非常危险的驾驶痛点。当盲点侦测系统(BSD)检测到车辆、行人或者大型物体进入盲点区域是,它能够以各种方式警告驾驶员。有些系统使用声音报警,有些系统可以在后视镜的角落显示警告。
通过毫米波雷达探测两侧的后视镜盲区中的超车车辆,以提醒驾驶者,避免在变道过程中由于后视镜盲区导致的事故。
说到盲点侦测系统,首先要说说盲点是如何导致的?当你驾驶汽车是,汽车的每个不是玻璃的部分都会造成盲点。这意味着有大窗柱的车辆具有较大的盲点,较小的后视窗车辆具有较大盲点,而且车辆内的货物和乘客也会造成额外的盲点。另外一种大家普遍关注的盲点存在于驾驶员的周边视觉和后视镜发射区域之间的空间中。这一类型的盲点可以覆盖整个车辆,这就是为什么改变车道而不向左右两边看是非常危险的。BSD 的功能就是帮助驾驶人员解决这个非常危险的驾驶痛点。当盲点侦测系统(BSD)检测到车辆、行人或者大型物体进入盲点区域是,它能够以各种方式警告驾驶员。有些系统使用声音报警,有些系统可以在后视镜的角落显示警告。

BSD 功能示意图
AEB (Autonomous Emergency Braking —— 自动紧急制动系统)
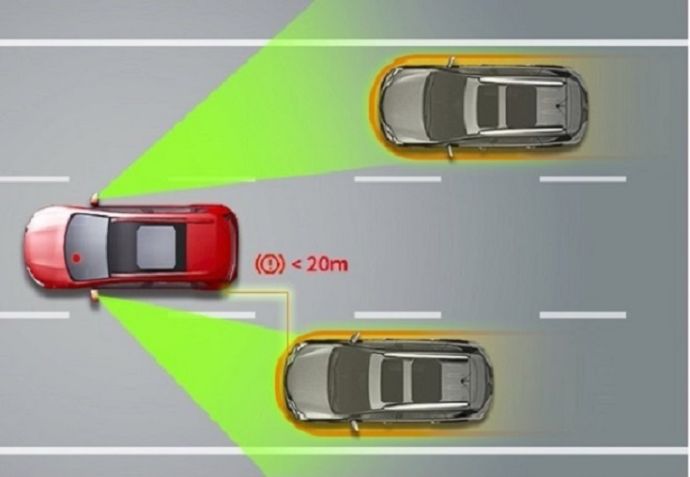
是一种汽车主动安全技术,使用毫米波雷达(或配合其他传感器)探测前车或者障碍物的距离,在下雨安全距离时主动介入制动车辆,保证车辆安全。
在驾驶员的日常驾驶中,追尾事故是最常见的一种。许多事故是由于制动过晚或者制动力不足造成。主要有几种原因,驾驶员分析或注意力不集中;能见度差;因前方驾驶员意外制动或行人突然穿过街道等难预测情况。大多是驾驶员不习惯处理这种紧急情况,并且没有足够的制动时间或者没有施加足够的制动力,甚至根本没有时间作出反应。AEB 就是用来解决这一痛点的。它的特点是,系统独立于驾驶员行事,只会在危急情况下进行干预,通过紧急制动来避免或减轻事故。
AEB 系统通常会首先通过警告提示驾驶员采取行动避免事故,如果驾驶员不采取任何措施并且依然存在碰撞危险,则系统会自行制动,以降低车速或停止车辆,从而避免事故发生。
AEB 功能示意图
FCW (Forward Collison Warming —— 前向碰撞警告系统)
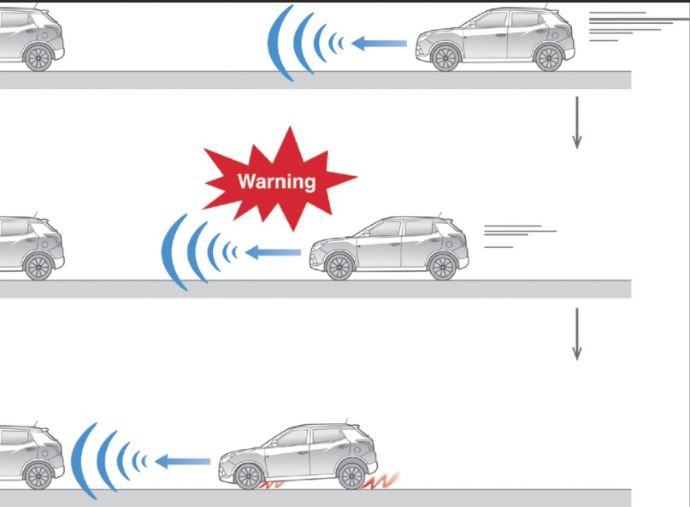
使用毫米波雷达来检测本车前方的车辆或者障碍物,系统通过得到的前方物体距离和本车速度来判断是否存在碰撞风险,如果有碰撞风险存在,则会通过声音或者视觉提示驾驶人员做适当处理。如果行驶当中前方车辆突然停止或减速,则前向碰撞警告系统会提示见识人员以便更早更快的做出反应。可以显著降低碰撞事故的发生。
FCW (Forward Collison Warming —— 前向碰撞警告系统)
使用毫米波雷达来检测本车前方的车辆或者障碍物,系统通过得到的前方物体距离和本车速度来判断是否存在碰撞风险,如果有碰撞风险存在,则会通过声音或者视觉提示驾驶人员做适当处理。如果行驶当中前方车辆突然停止或减速,则前向碰撞警告系统会提示见识人员以便更早更快的做出反应。可以显著降低碰撞事故的发生。


FCW 功能示意图
ACC (Adaptive Cruise Control —— 自适应巡航系统)
是一种智能的巡航驾驶控制系统,可以自动的加速和减速,以便于前方的车辆保持同步。驾驶员可以设置最大速度,然后雷达传感器见识前方的交通状况,锁定车道上的车辆,并且驾驶员可以在合理的范围内设定跟随距离。ACC 通常会与 FCW 配合工作,用以提示一些紧急情况。
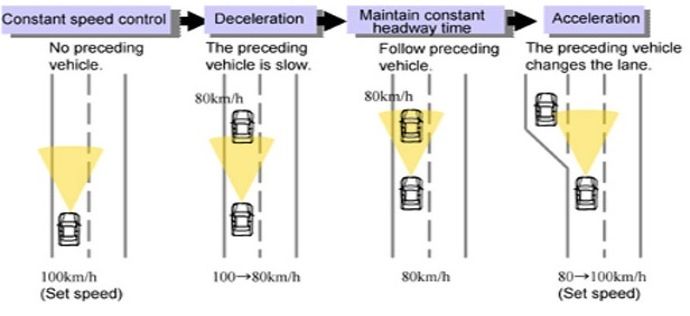 ACC 功能示意图
ACC 功能示意图总之,车载毫米波雷达的功能应用多种多样,在未来智能驾驶的发展过程中,将是一个重要的感知手段,多种功能的雷达与多种传感器的技术融合,是实现无人驾驶的必经之路。