

前言
随着直流无刷电机的广泛应用,由于有感电机容易受到各种因素的影响和密封运行带来的缺陷(如:高温或者振动都能使传感器掉落、密封运行性能不好等),有感电机已经不再能满足人们的需求;因此无感电机因运而生,并逐渐替代有感电机的位置,在各个领域占据相对重要的地位。
一、应用于无感电机的反电动势
故名思议,无感电机通过去掉传感器来解决有感电机的缺陷,但也因此需要运用新的方法来替代传感器获取转子的位置,而这种新的方法就是——利用反电动势。
反电动势,Back Electromotive Force,BEMF,是指由反抗电流发生改变的趋势而产生电动势。反电动势一般出现在电磁线圈中,如继电器线圈、电磁阀、接触器线圈、电动机、电感等。而反电动势的大小,意味着用电器把输入的总能量向有用能量转化的本领的强弱——用电器转化本领的高低。而在实际电机运行时,当没有了反电动势时,电能基本转化为热能,此时电机很容易烧坏,因此反电动势的大小对电机十分重要。
反电动势的决定因素包括转子角速度、转子磁体产生的磁场、定子绕组的匝数、气隙,而当电机设计完毕后,转子磁场、定子绕组的匝数与气隙大小都是确定的,因此唯一决定反电动势的因数是转子角速度,或者说是转子转速,即随着转子速度的增加,反电动势也随之增加。
无刷直流电动机的绕组反电动势含有转子位置信息,因此被用于无传感器控制;但反电动势最大的缺点就是当电机刚刚启动或者运行速度很慢时就很难甚至无法较准确的估测出电机转子的位置,因此应用反电动势的方法的前提条件是电机达到一定的转速(一般为额定转速的 5% 及以上)。应用于无传感器控制的反电动势包括电机的相反电动势和三次谐波电动势。而相反电动势的应用方法包括:反电动势过零法、反电动势积分及参考电压比较法、反电动势积分及锁相环法、续流二极管法等。
二、反电动势积分及参考电压比较法
- 硬件电路
以反电动势积分及参考电压比较法为例,相对于有感电机,因为少了传感器,所以原来的传感器电路替换为反电动势采样电路,如图一所示。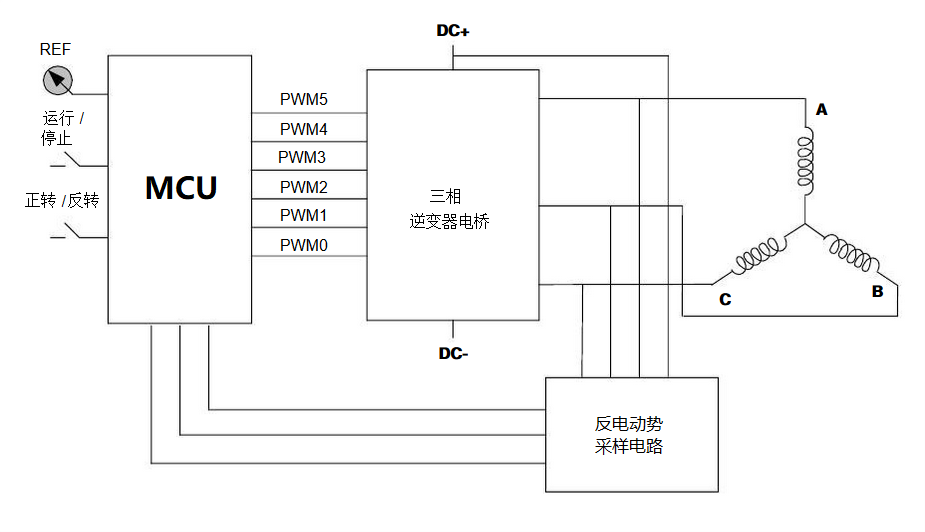
图一 无感电机的控制框图
- 控制环路
而对应的闭环控制(NXP BLDC 无感算法框图)如图二所示: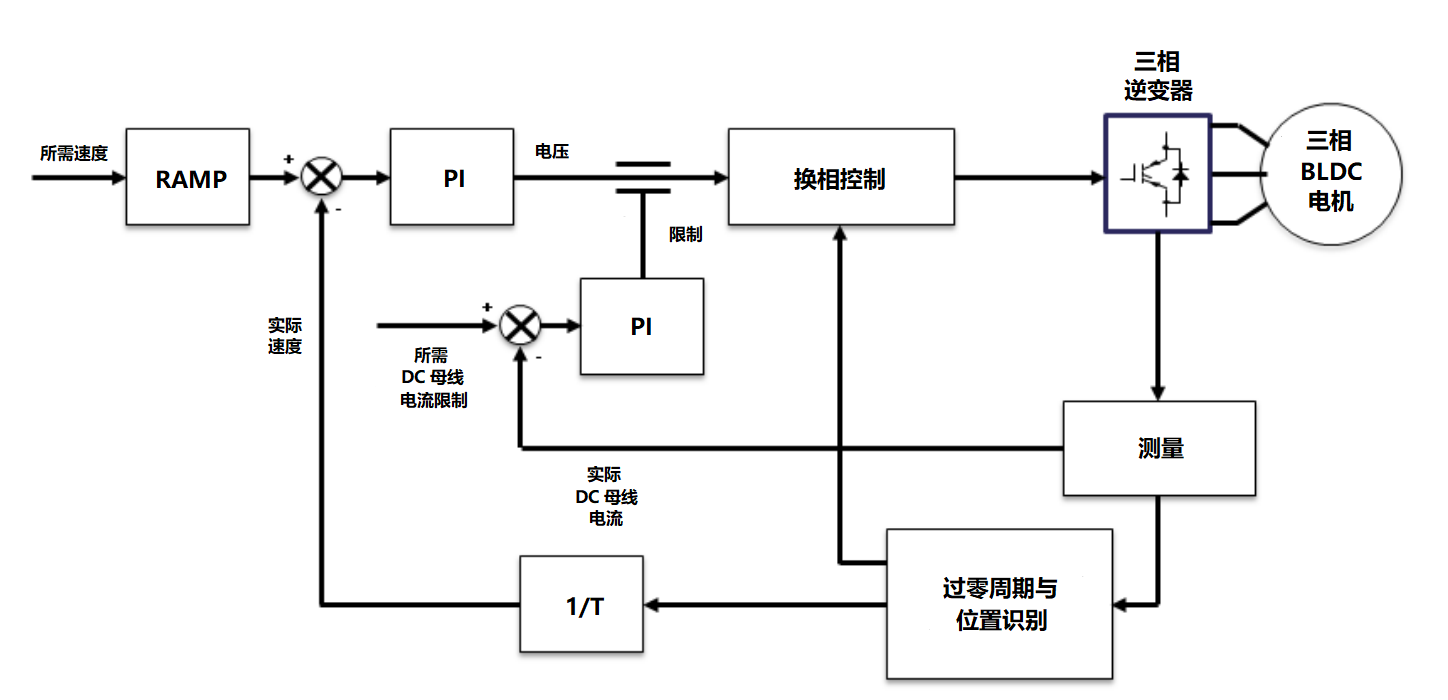
图二 带有电流限制的速度闭环控制
- 控制算法
带有电流限制的速度闭环程序源码分析,如图三、图四所示: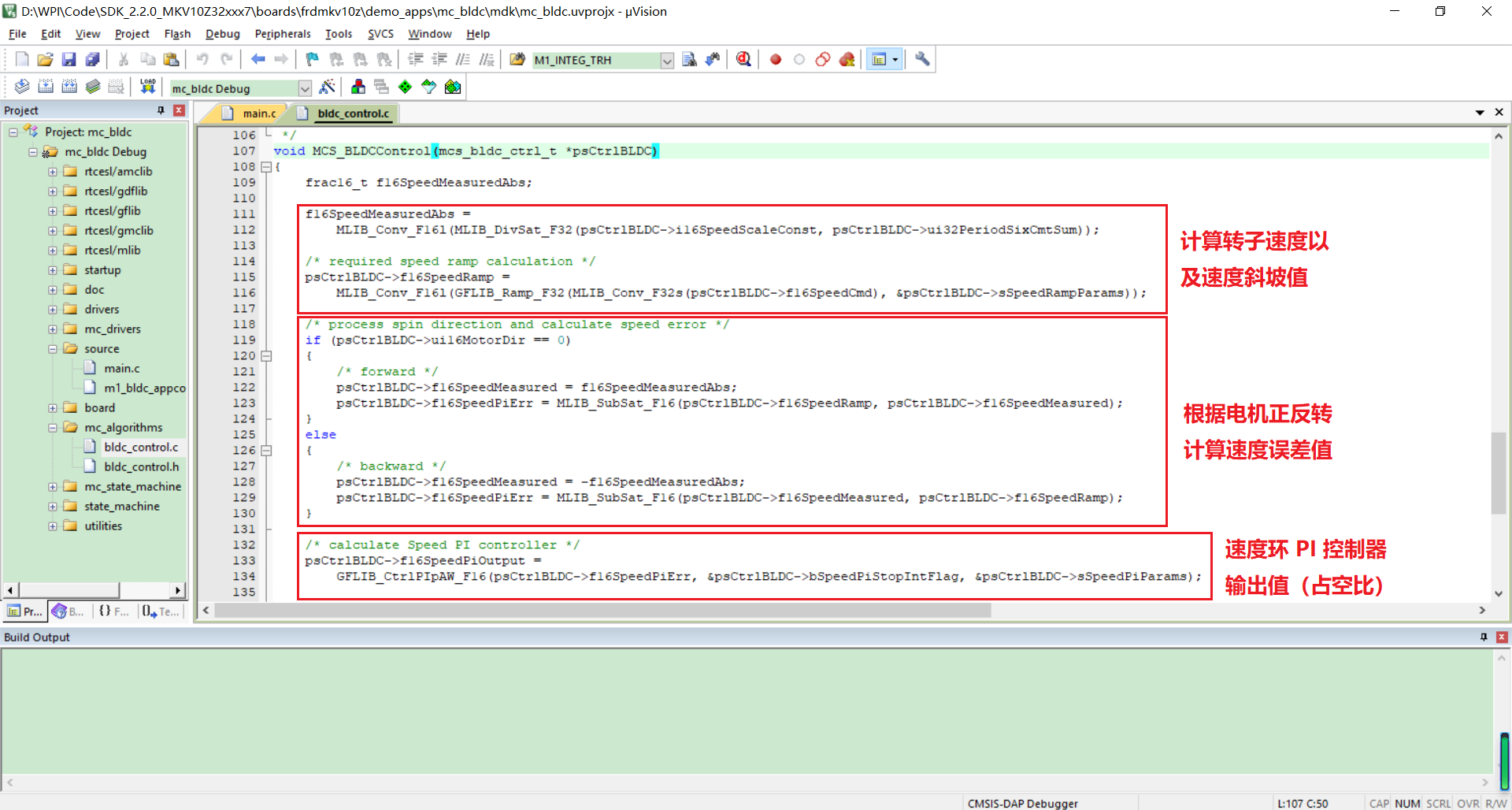
图三 带有电流限制的速度闭环程序源码分析(1)
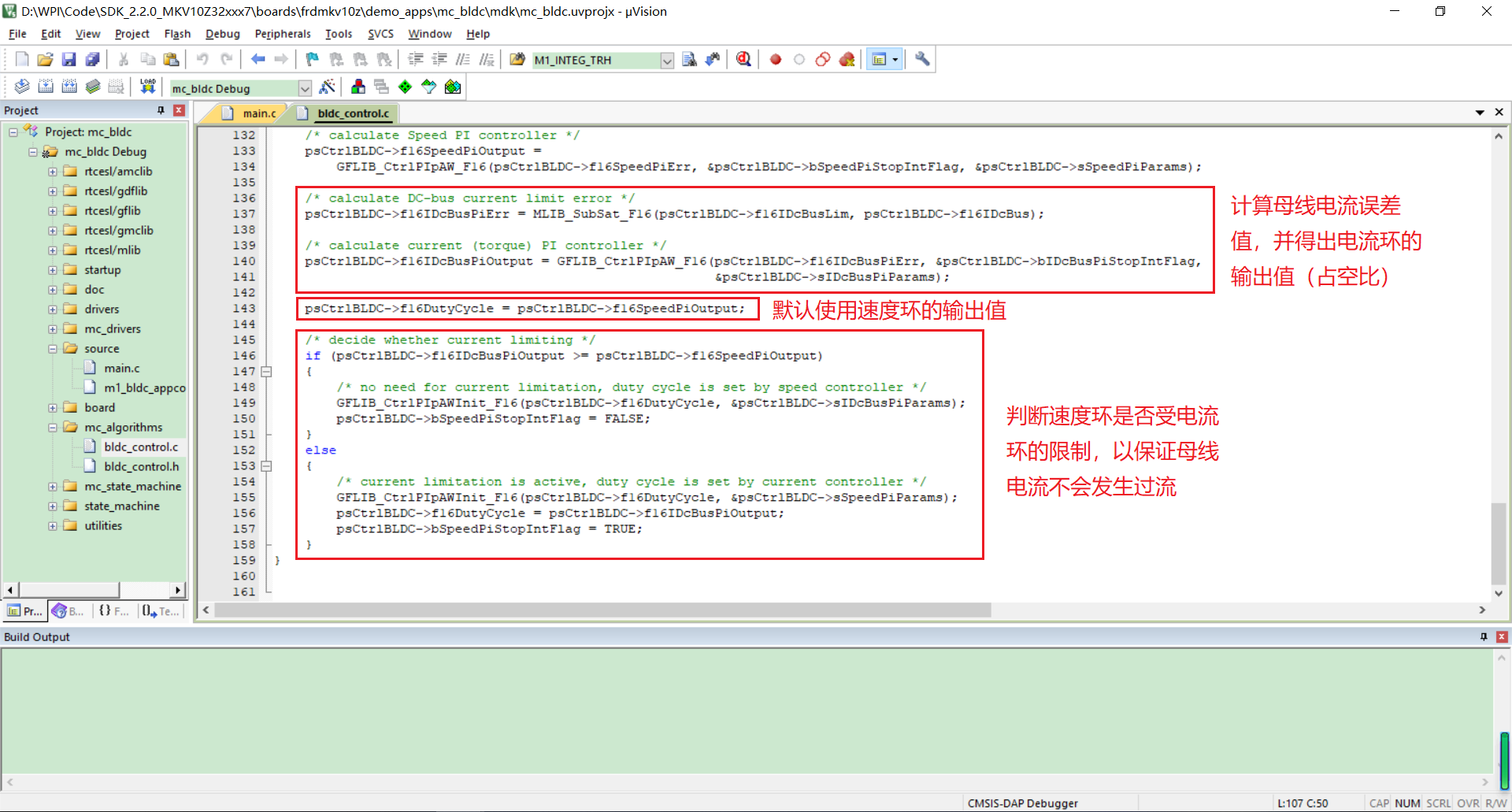
图四 带有电流限制的速度闭环程序源码分析(2)
三、电机控制状态机
与其他电机的运行状态一样,无刷无感直流电机的运行状态分为四个主状态:Fault、Init、Stop 和 Run,Run 状态又分为六个子状态:Calib、Ready、Align、Startup、Spin 和 Freewheel,分别如下图五和图六所示。
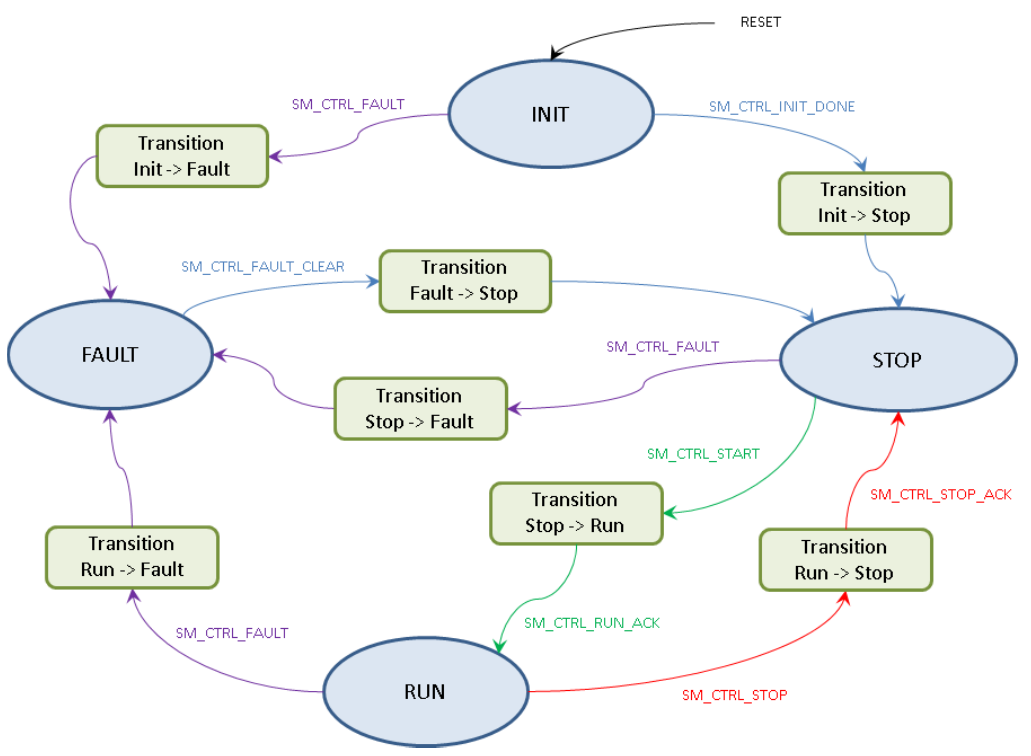
图五 电机主状态图
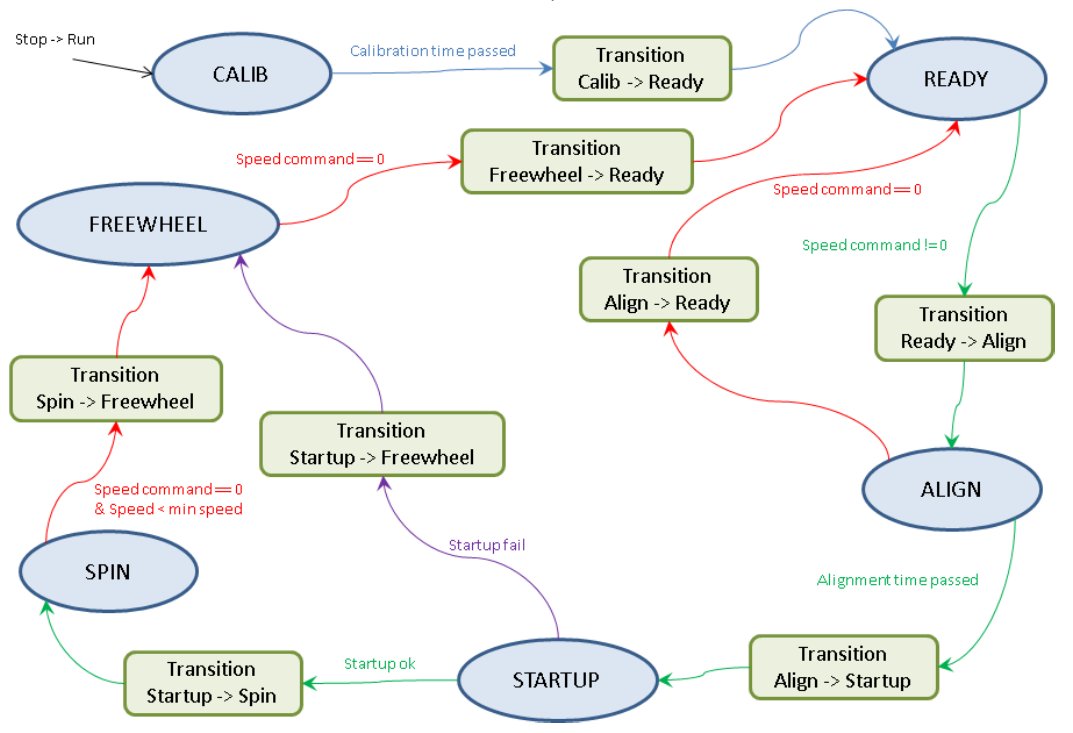
图六 电机 Run 子状态图
图五、图六中对应函数如下图七、图八和图九所示: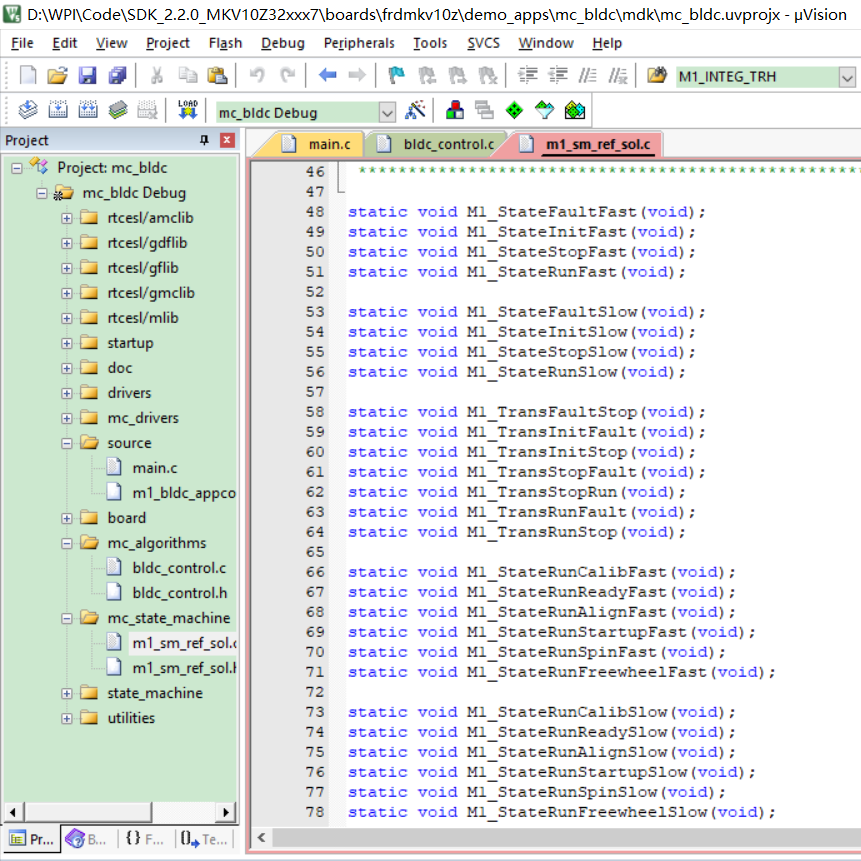
图七 电机状态对应函数图(1)
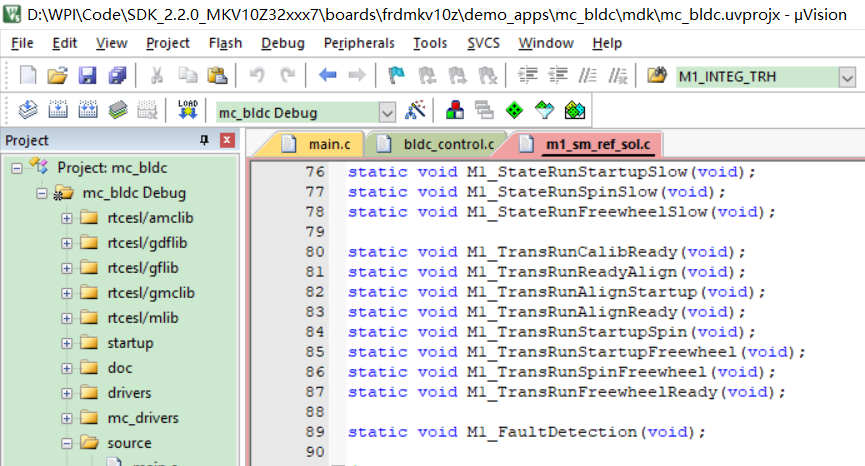
图八 电机状态对应函数图(2)
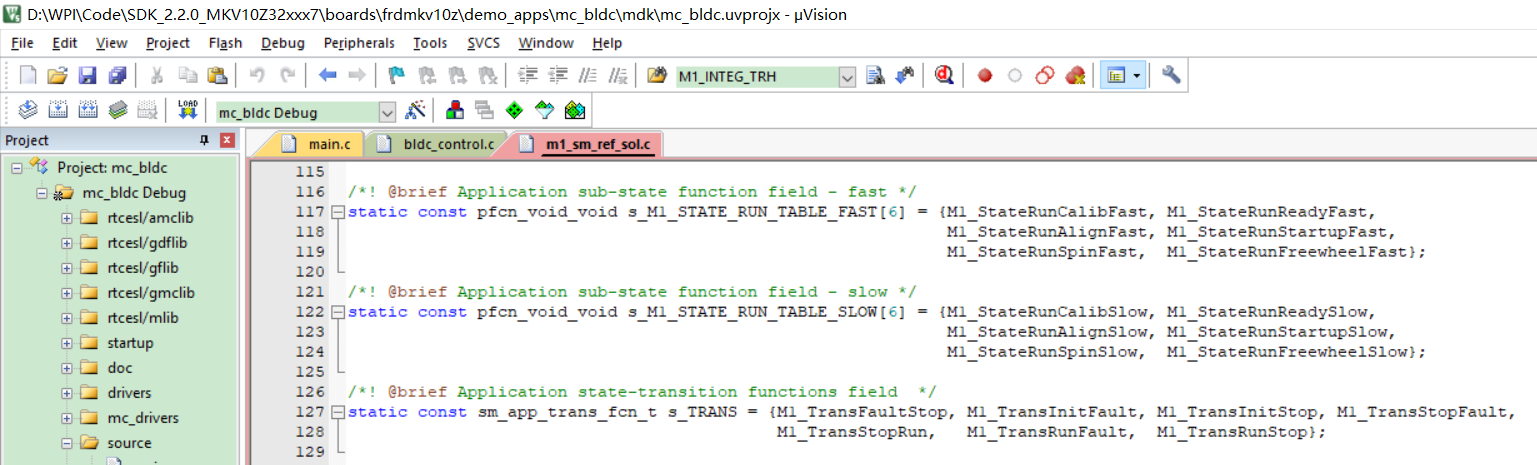
图九 电机状态对应函数图(3)
一入电机深似海,本期的基础知识介绍就到此结束了,后续会对算法具体函数、反电动势过零法与反电动势积分及参考电压比较法等内容进行更深入地介绍,我们不见不散。
四、参考文献
- 3-Phase BLDC Sensorless Motor Control Application,document DRM144 available in freescale.com
- 反电动势_百度百科
https://baike.baidu.com/item/%E5%8F%8D%E7%94%B5%E5%8A%A8%E5%8A%BF/4393554?fr=aladdin
五、修订历史
表1. 修订历史
|
版本号 |
日期 |
重要变更 |
|
0 |
2020/02/18 |
初始版 |