

上一篇博文给大家介绍了运动控制系统以及运动控制系统的市场相关概况。让我们一起回顾下,运动控制系统一般由控制器、驱动器、电动机、负载以及相关的传感器组成。
那么这篇博文就让我们一起来看看运动控制系统中伺服驱动的架构吧。
伺服是按控制命令的要求,对功率进行放大、变换以及调控等处理,使驱动装置输出的力矩、速度和位置能被控制得非常灵活、方便。伺服驱动的框图如下所示: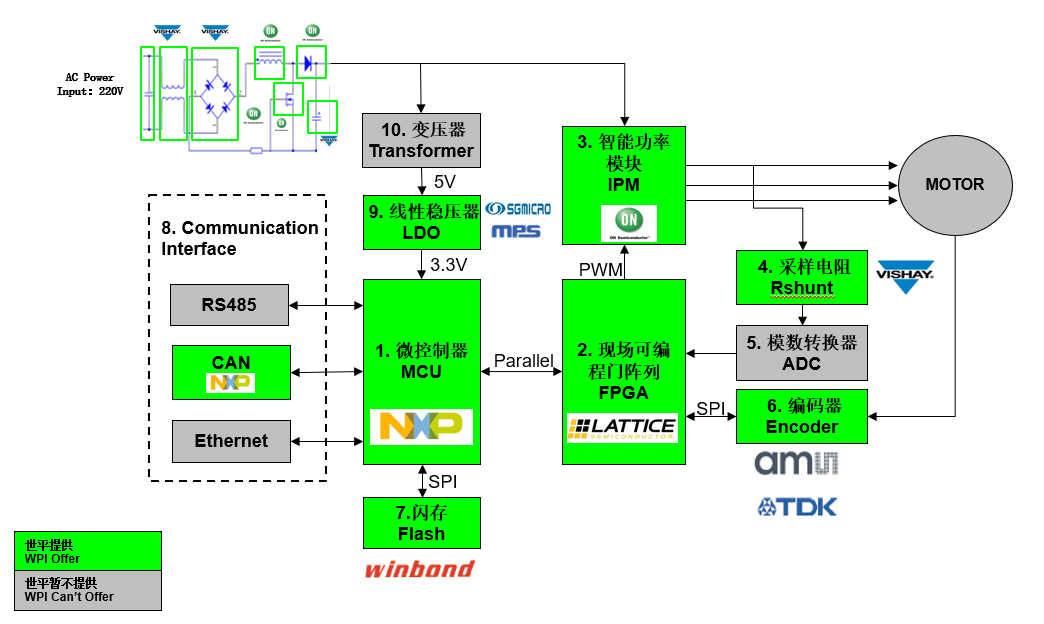
伺服驱动框图
伺服驱动器大体可以划分为功能比较独立的功率板和控制板两个模块。功率板是强电部分,主要用来为整个系统提供数字和模拟电源,同时使用智能功率模块(IPM)用于电机的驱动。IPM 内部集成了驱动电路,具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入了软启动电路,以减小启动过程对驱动器的冲击。因此一般需要根据具体的应用场景及功率段来进行功率器件的选择。
控制板是弱电部分,是电机的控制核心,也是伺服驱动器的技术核心控制算法的载体。控制板通过相应的算法输出 PWM 信号,作为功率板的驱动信号,来改变逆变器的输出功率,以达到控制三项永磁同步电机的目的。目前主流的伺服驱动器一般采用 ARM + FPGA 架构,其优点是可扩展性强,同时可以实现比较复杂的控制算法。
目前市场上伺服驱动的功能需求一般如下:
- 通用伺服驱动为 ARM + FPGA 架构, MCU 与 FPGA 通过并口通信;
- 电流环,脉冲分频输出由 FPGA 处理,电流环频率一般为 8K / 16K;
- MCU 处理速度环与位置环,并做 RC 滤波,同时与系统周边进行数据通信;
- 一般为单电阻相电流采样,会外挂 16bit 带 ΣΔ 的 AD 模块;
以上我们发现伺服驱动对 MCU 的性能要求比较高,同时需求 MCU 有丰富的外设用来做数据交互。现在让我们来看看 NXP 高性能跨界处理器 I.MX RT 系列中的 RT1020,其规格框图如下: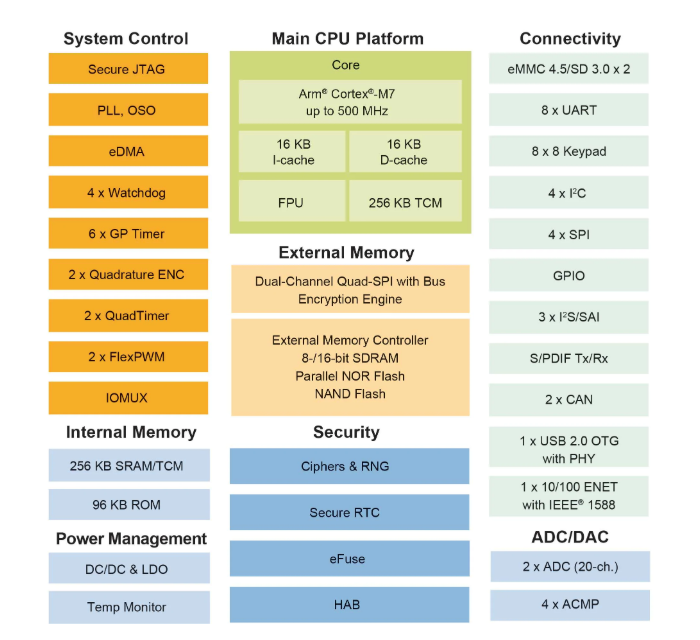

芯片特点:
- 基于 Cotex-M7 内核,主频高达 500MHZ;
- 具有 VFPv5 架构支持的全功能浮点单元(FPU);
- 带 PHY 的高速 USB;
- 多 PWM 用于双电机控制;
- 安全性(即时 FlexSPI 解密);
- 外部存储器接口:
- 8/16 位 SDRAM,最高 SDRAM-133;
- 8/16 位 SLC NAND 闪存,采用软件处理 ECC;
- SD / eMMC;
- SPI NOR 闪存;
- 具有XIP支持的并行 NOR FLASH;
- 具有XIP支持的单/双通道 Quad SPI FLASH;
同时针对伺服驱动,WPI ATU 完成了基于 NXP RT1020 的高压伺服驱动方案,框图如下: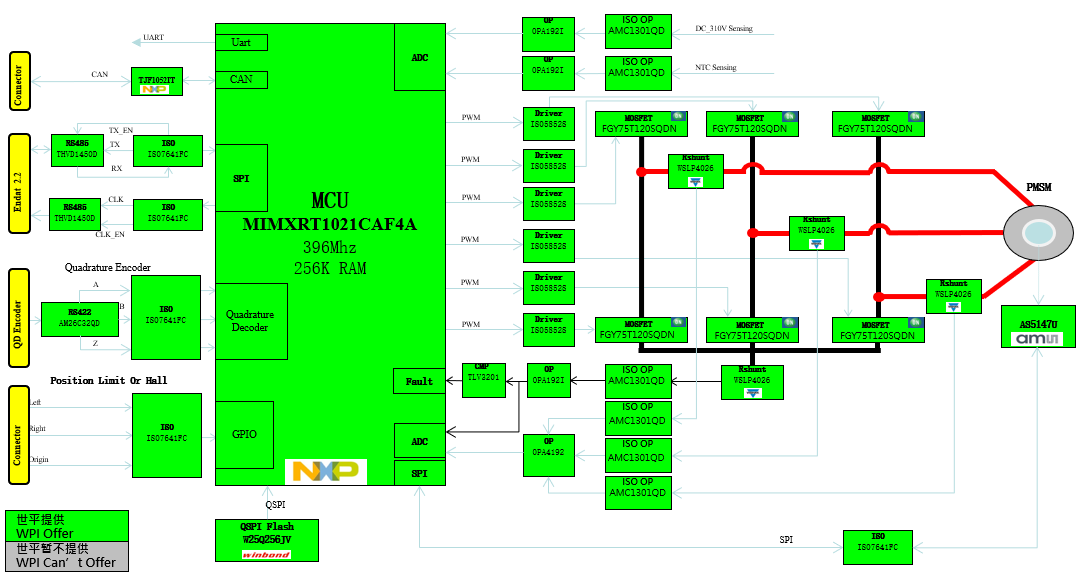
Driver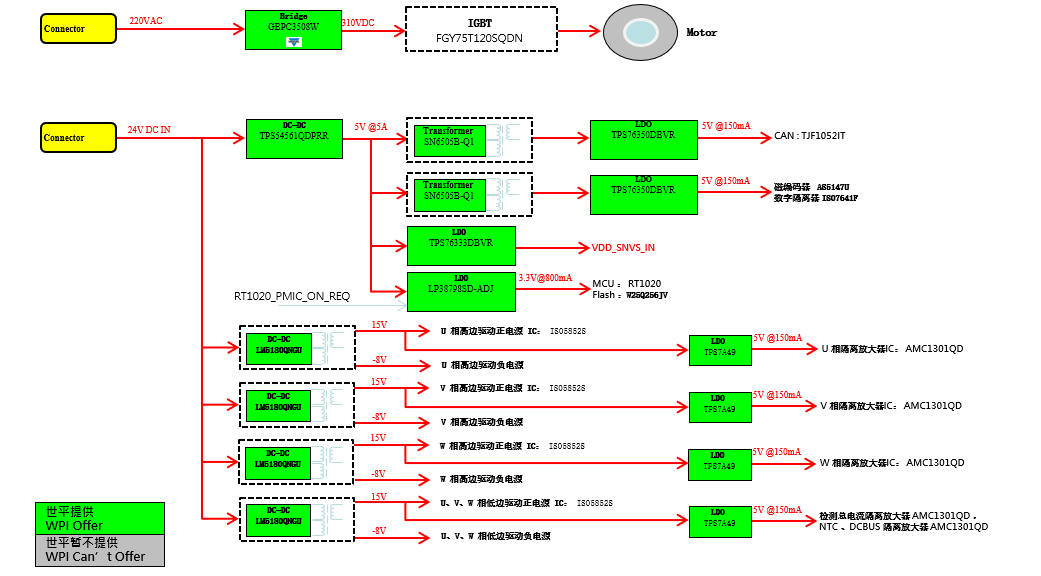
Power
Function Description:
- 基于 RT1020 的 PMSM 高压伺服电机驱动板
- 工作电压、最大功率:310 V DC、3000 W
- IGBT 驱动电源隔离、信号隔离
- 功能完善的 IGBT 驱动,支持去饱和检测、米勒钳位、UVLO、正负电源输入、软关断、状态输出、5KV 隔离
- 采用 AMS 14Bit 绝对位置高精度磁传感器
- 带增量编码器输入接口,支持位置闭环控制
- 二电阻直接采样相电流并提供过流保护
参考资料:
- 田宇,伺服与运动控制系统设计;
- NXP 官网;
- 电子发烧友;
- 中国传动网
评论