

Hi3566V100 是一颗面向车载行车记录仪、驾驶员状态监控等领域推出的高性能、 低功耗的 Camera SoC。
Hi3566V100 内核为 Cortex A7 MP2 @792MHz,支持双路 1080p@30fps H.265/H.264 编码。
二、 Hi3566V100 THCV242 解串器 设计要点
① Hi3566V100 的 VI 可以复用为两种接口:Parallel CMOS 视频输入接口和差分视频输入接口(即 MIPI RX 接口),这里采用的是 MIPI RX 接口。
② Hi3566V100 的差分视频输入接口有 2 组差分时钟信号和 4 组差分数据信号,支持 2 Lane MIPI RX 输入和 4 Lane MIPI RX 输入。Hi3566V100 对接 4 Lane MIPI RX 规格时,MIPI_RX_CK0P/N 对 MIPI_RX_D0P/N、 MIPI_RX_D1P/N、MIPI_RX_D2P/N、MIPI_RX_D3P/N 进行采样。
③ Hi3566V100 对接 2 Lane MIPI RX 规格时,MIPI_RX_CK0P/N 对 4 Lane 数据中的任意 2 Lane 进行采样。设计时建议优先选择 MIPI_RX_D0P/N 和 MIPI_RX_D2P/N。
④ Hi3566V100 对接 2 Lane + 2 Lane MIPI RX 规格时,要求 MIPI_RX_CK0P/N 对 MIPI_RX_D0P/N、MIPI_RX_D2P/N 进行采样,MIPI_RX_CK1P/N 对 MIPI_RX_D1P/N、MIPI_RX_D3P/N 进行采样。
这里采用 2 Lane + 2 Lane MIPI RX 规格设计,其中 2 Lane 对接 Sensor 0(DVR)这里不做讨论,另外 2 Lane 对接 Sensor 1(DMS) 的解串器 THCV242 的输出。具体连接如下图所示。
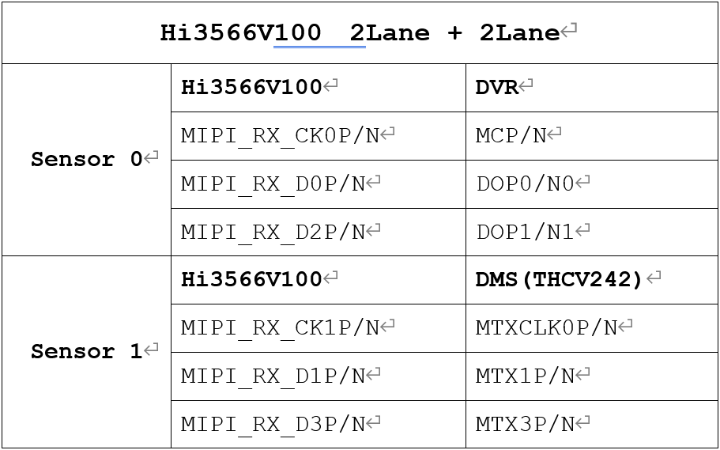
▲ 图 1 Hi3566V100 2 Lane + 2 Lane 信号分配图
⑤ 选用 SOC 端的 MIPI_RX_CK1P/N、MIPI_RX_D1P/N、MIPI_RX_D3P/N 对接 THCV242 端的 MTXCLK0P/N、MTX1P/N、MTX3P/N,并串联 0 欧姆电阻。
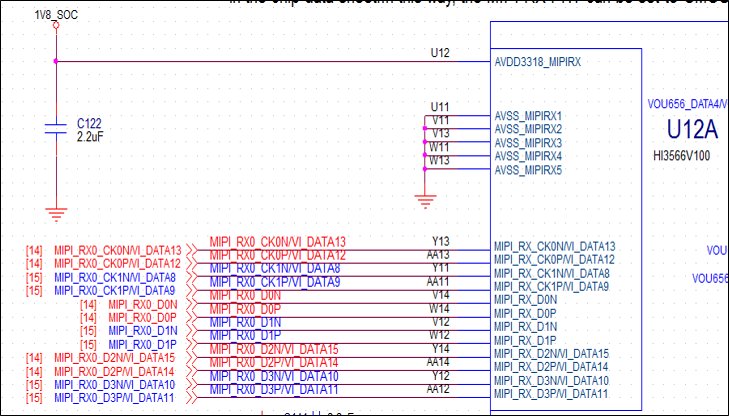
▲ 图 2 SoC 端 MIPI RX 连接图
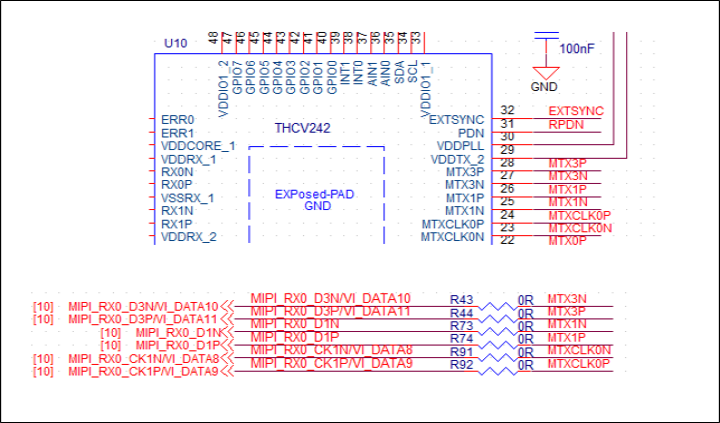
▲ 图 3 THCV242 端 MIPI TX 连接图
⑥ THCV242 端原理图设计还包括:SoC 与 THCV242 的控制电路、信号输入电路、电源电路及复位电路等。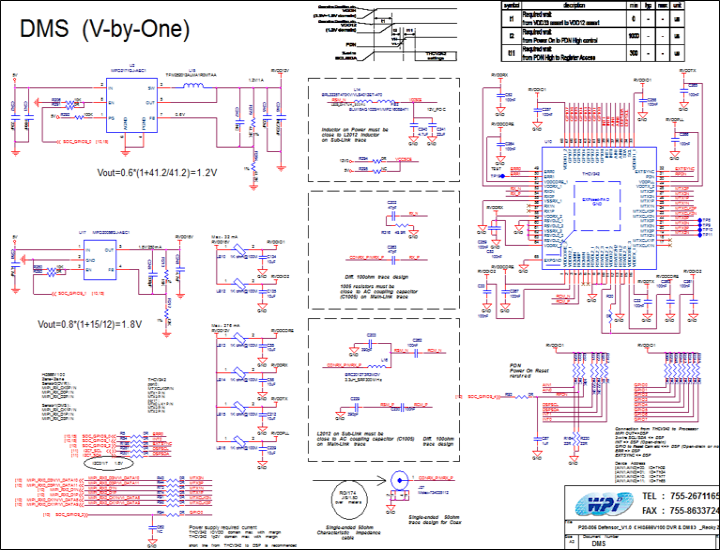
▲ 图 4 THCV242 端原理图
⑦ SoC 端与 THCV242 端的控制信号主要包括:I2C(DSPSDA/DSPSCL)、同步信号(EXTSYNC)、
中断信号(INT0)、错误/状态信号(ERR0)等。
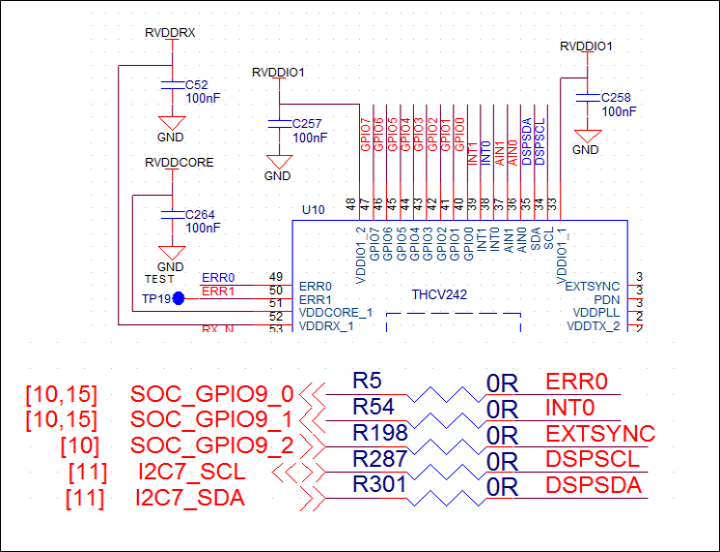
▲ 图 5 THCV242 端控制信号连接图
⑧ THCV242 的信号接收电路主要包括:Fakra 连接器、信号输入、载波供电电路、Sub-Link 电路等。
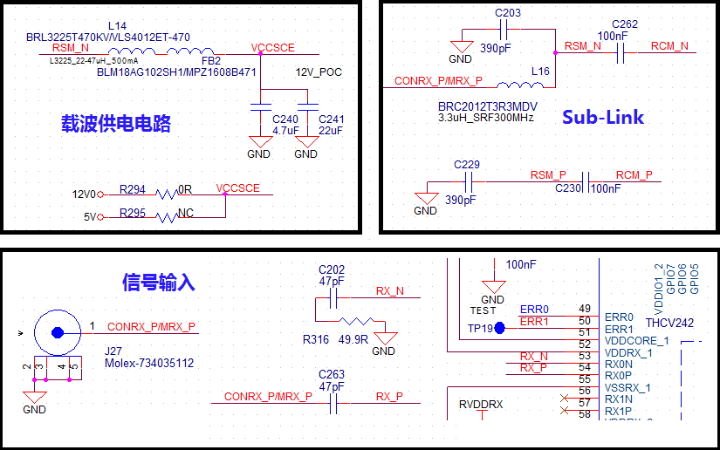
▲ 图 6 信号输入连接图
⑨ THCV242 的供电电源为 1.2V 和 1.8V。上电顺序为 1.8V、1.2V,延时 1000 微秒后复位。
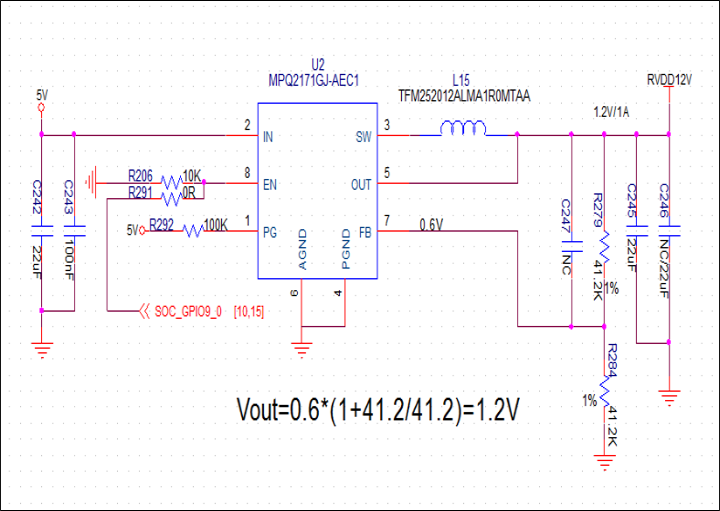
▲ 图 7 THCV242 1.2V 供电电路
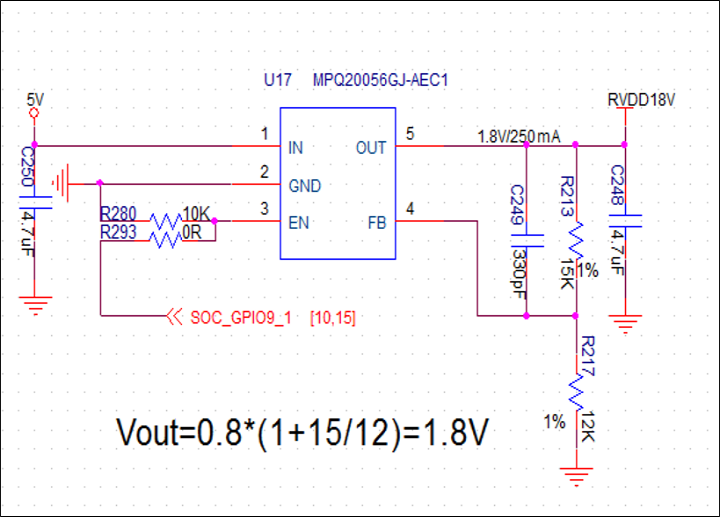
▲ 图 8 THCV242 1.8V 供电电路
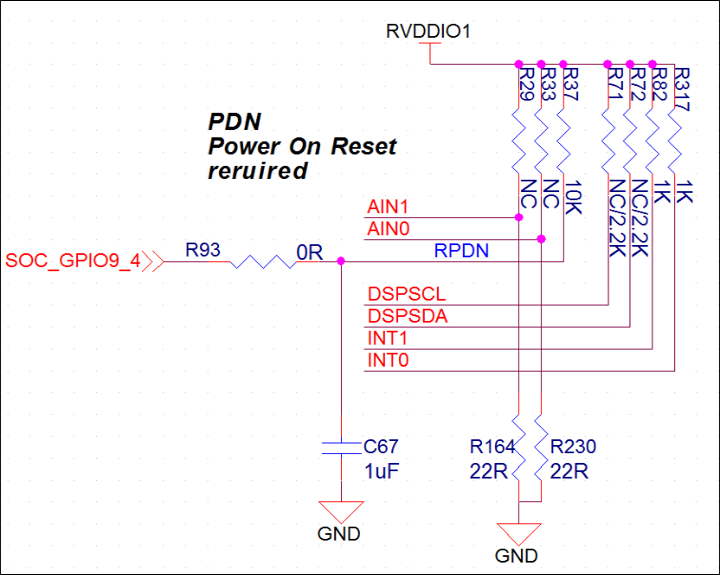
▲ 图 9 THCV242 RPDN 复位信号
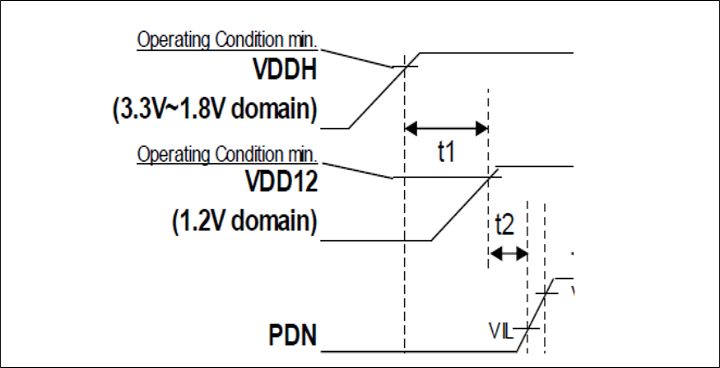
▲ 图 10 THCV242 上电时序图
三、 PCB 设计要点
① 信号输入部分:电阻 R316 要靠近耦合电容 C263 放置,并做差分走线,阻抗要求 100 欧姆。
② Sub-Link 部分:电感 L16 要靠近耦合电容 C263 放置,并且 RCM_P/N 要做差分走线,阻抗要求 100 欧姆。
③ 载波信号供电部分:电感 L14 要靠近 电感 L16 放置。
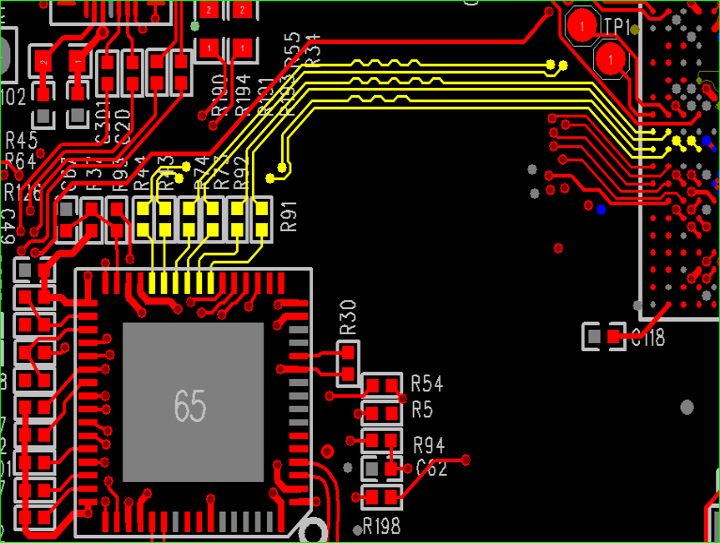
④ MTX1P/N、MTX3P/N、MTXCLK0P/N 做差分走线,阻抗要求 100 欧姆。
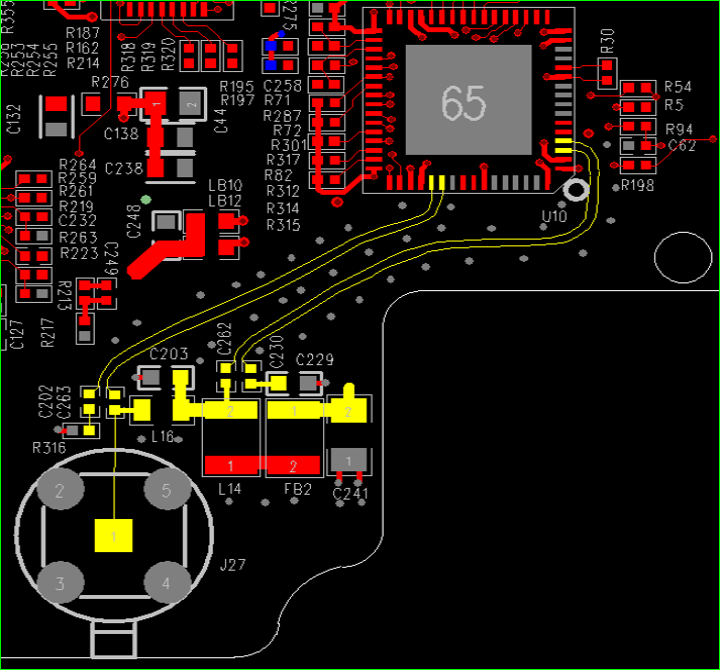
▲ 图 11 信号输入部分器件放置及 PCB 走线
⑤ 如需进一步的技术交流讨论,请在 大大通 上关注我,并给我留言。
四、 参考文献
① 《 Hi3566V100 Automotive Camera SoC Data Sheet 》
② 《 Hi3562V100╱Hi3566V100 硬件设计用户指南 》
③ 《 HI3566V100DMEB_VER_B_SCH 》
评论