

一、 车载 Sensor 简述
车载相机应用目前普遍要求兼顾人类视觉以及机器视觉两方面的需求,从image sensor选型的角度,要从分辨率、曝光方式、帧率、动态范围、LED频闪 等方面进行考量。另外还可以根据不同应用选择不同的Image sensor,如:DMS(驾驶员监控系统)、RVC (后视摄像) 、ADAS(驾驶员辅助系统)等。
二、 车载 Sensor 的考量方面
- 分辨率 ( Resolution )
目前主流分辨率是2M ,有的应用需要2.5M ,这样可以适配更大一点的垂直 FOV 的lens ,多拍到一些路面和天空。5M 已经有一些应用开始使用,8M现在还比较少。
- 曝光方式( Shutter type )
Global shutter ( 全局曝光 )或者是 rolling shutter ( 滚动曝光 )。大部分的应用使用 rolling shutter 都可以满足要求。In-cabin camera需要监控人眼球的快速运动,以及与IR 闪光同步,所以往往需要global shutter配合。由于Global shutter的设计往往会造成SNR的损失,这是其相对rolling shutter的一个缺点。另外成本也是大部分应用选择rolling shutter的一个原因。
- 帧率( Frame rate )
大部分应用要求60fps。对8M的应用,由于带宽的限制,帧率要求会降低到45fps。
- 动态范围 ( Dynamic Range )
大部分应用要求DR大于120dB,高端的要求大于140dB。由于sensor 对LED flickering和motion的消除处理会减小最终输出的DR,所以在选型时都会考虑在处理LED flickering以及motion的条件,sensor的输出DR。一般要求在Led Flickering Mitigation( 闪烁减缓 ),Motion Artefact Free( 运动伪影)条件下,DR大于110dB。
温度也是影响DR的一个重要因素,温度升高会导致噪声提高,使得DR减小。车载 camera 的温度使用范围一般是 -40° 到 125°,所以针对不同温度范围的DR要求,也在选型考虑的范围内。
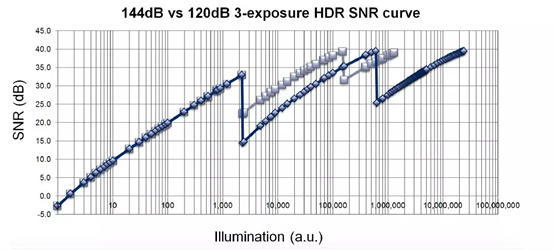
因为目前 WDR sensor都是靠多曝光融合输出的,多帧融合会产生在stitching 位置的SNR drop,所以这个SNR drop的指标也在考虑范围之内。如图 1 所示,多曝光融合的 SNR 曲线。
- LED频闪( LED flickering )
之前博文中有稍微介绍了频闪的成因与解决方法,消除60Hz以下的LED频闪是一个对车载sensor的重要要求。
- 运动伪影( Motion Artefact )
运动会造成多曝光融合在运动的位置产生拼接错误( artefact ),所以MAF 也是一个选型的重要考量,对于 split pixel 方案的 WDR sensor,天然的就解决了这个问题。
- 主光线角度( CRA )
对于模组高度要求有限制的应用会比较关注 sensor 的 CRA ,高的 CRA 有利与设计薄一些的模组。需要提醒的是 sensor CRA 与 lens CRA 的匹配,匹配不好会导致图像质量问题,这在一定程度上约束了lens的选型。
三、 OV车载 Sensor 的推荐
DMS (驾驶员监测系统)一般推荐使用 OV9284 与OV2311 ,分辨率2M 左右,全局曝光,近红外表现好,低功耗,小封装。
ADAS/AD (高级驾驶员辅助系统/自主驾驶)一般推荐使用 OV10640 、OV10650 等,高动态范围,耐高温,低功耗,小封装。可后接 OV491 、OV495 等ISP 芯片处理图像效果。
RVC (后视摄像头) 一般推荐使用1-2.5M ,自动HDR,低照度表现好,内置OSD 的芯片,如:OV9716、OV9706、OV2775 等。可后接 OV494 等ISP 芯片处理图像效果。
SVS (环视摄像头)一般推荐使用1-2.5M,自动HDR,小封装的芯片,如:OV9706 、OX01F10等。
本篇文章介绍了车载 sensor 的选型,最后主要推荐了 OV Sensor 。如果有问题需要交流,请在博文下提问。如果有喜欢小鱼干的,也请多多关注我的大大通账号:小鱼干。

【参考文献】
- Omnivision automotive product roadmap_For WPI
评论