

前面两篇文章我们介绍了 海思 Camera 系列,接下来我们开始进入 i.MX8 系列;这篇文章主要介绍 i.MX8QM 智能座舱解串器 TI DS90UB960-Q1 的硬件匹配调试要点。

ATU 设计的 i.MX8QM 智能座舱方案,采用 NXP i.MX8QM 作为主芯片,基于一个 Cortex-A72,四个 Cortex-A53,两个 Cortex-M4F 架构。支持双系统,4 路显示输出以支持多屏显示,两路 MIPI-CSI 输入,支持 倒车后视、DVR、AVM、DMS 功能,还支持 4G、Wi-Fi、蓝牙 等网络功能。
i.MX8QM 智能座舱硬件设计和调试要点
- i.MX8QM 智能座舱应用于多屏显示的智能驾驶方案上。
- i.MX8QM 智能座舱方案分为 Main Board 和 Base Board 两块板,Main Board 可独立工作,最小系统、多屏显示、MIPI-CSI 输入都在 Main Board 上。

- 解串器 DS90UB960-Q1 的 MIPI-CSI 接口,接到 i.MX8QM 的 CSI0 接口,而 DS90UB960-Q1 最多可以支持 4 路带串行器的摄像头输入,整个方案的功能需求只需要两路输入,但是硬件预留了 4 路。匹配的串行器是 TI DS90UB953-Q1。

i.MX8QM CSI0 接口原理图
DS90UB960-Q1 芯片端原理图
DS90UB960-Q1 在同轴输入端原理图
- 我们综合 DS90UB960-Q1 的规格书和之前做过的 DS90UB960-Q1 方案,DS90UB960-Q1 在同轴输入端原理图匹配 DS90UB953-Q1 的初始值设为:
① R662=0 ohm,L150=NC
② R661=4.02K,L146=10uH
③ L148=L149=330 ohm
④ L147=47 ohm,L145=NC
⑤ R660=49.9 ohm
⑥ C989=33nF
⑦ C990=33nF
- 但是在软件调试驱动的过程中,I2C 读不到串行器 DS90UB953-Q1 的完整信息。
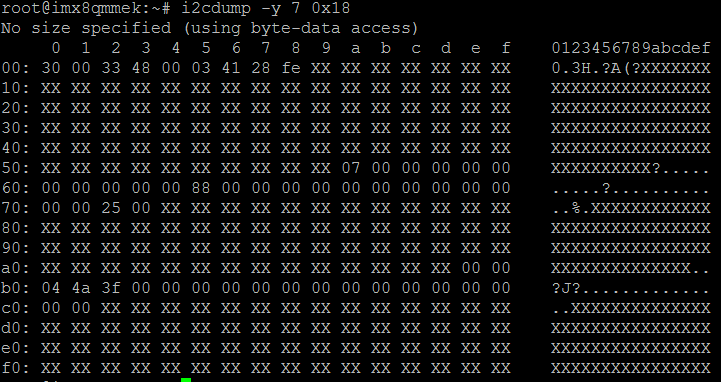
- 用示波器测量波形如下:

- 做如下调整,I2C 通信成功:
① L146 贴 10uH(贴片时没贴上)
② 去掉 L145(贴片时多贴)
③ C990 调整成 15nF(根据规格书取值范围调整)

- 用示波器测量波形如下:

- 把调好后的元件值更新到原理图,参考如下:

以上就是关于 解串器 TI DS90UB960-Q1 的硬件匹配调试要点;下期我们将会推出 i.MX8QM Standalone 方式搭建开发环境。
接下来我们也会不断更新更多关于 i.MX8 系列的开发博文,同时我们也会持续推出更多 ADAS 相关(S32V234、Hi3566V100、Hi3559AV100、Hi3518EV300、硬件、软件、算法等)的技术开发博文,如需更深入的技术交流,欢迎在博文下方评论或者关注给我留言。
参考文献
- 《 SCH - P19-019 Bumblebee-MB_V1.0(i.MX8QM 智能座舱)_Recky Zhang_2020.01.09 》
2.《 ds90ub960-q1 》
3.《 snlu226a-EVM 》
评论