

一. 前言
WPI i.MX8QM Bumblebee 智能座舱项目需要调试 HSD123KPW2 的屏幕 ,主板有两路 MIPI 信号输出,屏的分辨率为 1920 X 720 ,屏幕通过 Serdes 的方式与主板相连 ,主板串行器为 TI DS90UB941 ,屏幕解串器为 TI DS90UB941 ,主板把 MIPI 信号通过 TI DS90UB941 串行器发送给屏幕解串器 DS90UB948 , DS90UB948 输出双 MIPI 信号给屏幕进行显示

图1 信号数据流程图
二. 屏幕调试环境
2.1. 软件环境 :
使用软件版本为 imx-automotive-10.0.0_1.1.0 , 推荐使用 Android 10 及以上版本 ,对应的 Linux 版本为 :L4.19.42
Lunch 选择 :mek_8q-userdebug
2.2. 硬件环境 :
Bumblebee-MB_V1.0(i.MX8QM 智能座舱)
HSD123KPW2 , 1920 X 720 , 12.3 寸的屏幕

图2 Bumblebee-MB_V1.0
三. 实现 Serdes 数据通信
3.1 对 DS90UB941 进行上电
使能 DSI0_VDD1V8 ,DSI0_VDD_1V1 这两个电平
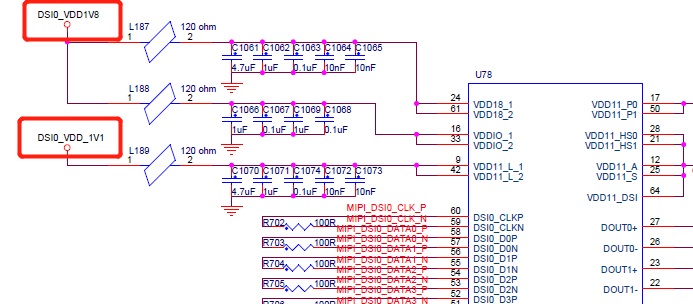
图3 DS90UB941 原理图
3.2 配置 MODE_SEL0 和 MODE_SEL1 电平
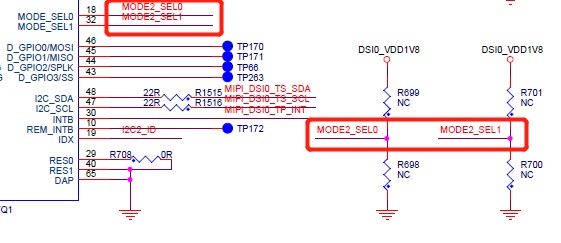
图4 DS90UB941 MODE_SEL0 电路图
MODE_SEL0 电平配置 :
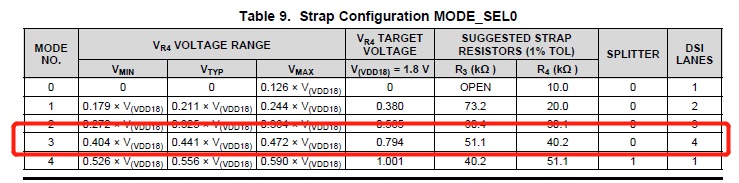
图5 MODE_SEL0 配置说明
MODE_SEL1 电平配置 :
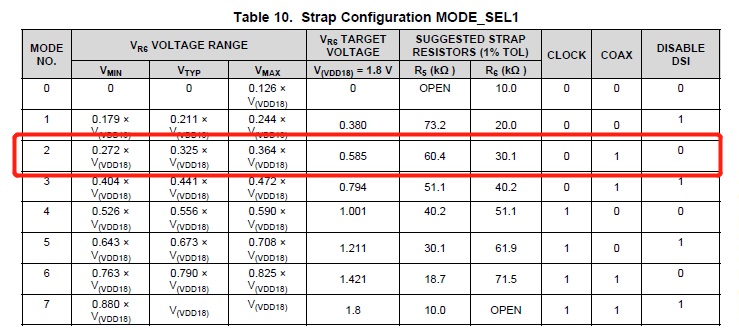
图6 MODE_SEL1 配置说明
以上设置完成后可以检查到 DS90UB941 和 DS90UB948 这两个设备
四. 驱动程序编写
4.1 DS90UB941 & DS90UB948 寄存器配置
在 vendor\nxp-opensource\kernel_imx\drivers\gpu\drm\bridge 目录下添加驱动程序 ti941.c
4.1.1 DS90UB941 I2C WRITE 函数
struct STi941_config
{
unsigned char ti941_reg;
unsigned char ti941_data;
};
struct sTI941
{
struct i2c_client *lvds_i2c;
struct regmap *lvds_regmap;
struct drm_bridge bridge;
struct drm_connector connector;
struct gpio_desc *reset_gpio;
bool is_hdmi; bool split_mode;
};
static int ti941_write_reg(struct sTI941 *ti941, u8 reg, u8 val)
{
struct regmap *regmap = ti941->lvds_regmap;
int ret;
ret = regmap_write(regmap, reg, val);
return ret;
}
4.1.2 DS90UB941 I2C READ 函数
static int ti941_read_reg(struct sTI941 *ti941, u8 reg)
{
struct regmap *regmap = ti941->lvds_regmap;
int ret;
unsigned int status;
ret = regmap_read(regmap, reg, &status);
reg = status;
return ret;
}
4.1.3 使能 DSI0_VDD1V8 和 DSI0_VDD_1V1
#define IMX_GPIO_NR(bank, pin) (480 - (bank * 32) + (pin & 0x1f))
#define LSIO_GPIO2_IO29 IMX_GPIO_NR(2, 29) /* GPIO2_29 */
#define LSIO_GPIO2_IO30 IMX_GPIO_NR(2, 30) /* GPIO2_30 */
static void Ti941_StartUp(void)
{
gpio_request(LSIO_GPIO2_IO29, "gpio2_io22_DSI0_1V1_EN");
gpio_direction_output(LSIO_GPIO2_IO29, 1);
gpio_request(LSIO_GPIO2_IO30, "gpio2_io23_DSI0_1V8_EN");
gpio_direction_output(LSIO_GPIO2_IO30, 1);
}
4.1.4 DS90UB941 初始化函数
static int ti941_init(struct sTI941 *ti941)
{
int i,num;
num = ARRAYSIZE(ti941_para);
for ( i = 0; i< num; i++)
{
u8 reg = ti941_para[i].ti941_reg;
u8 val = ti941_para[i].ti941_data;
printk("ti941 num %d:0x%02x 0x%02x \r\n",i,reg,val);
if (ti941_write_reg(ti941,reg,val) < 0)
{
printk("ti941_write_reg fail : reg = 0x%02x.\n", reg);
}
}
}
4.1.5 注册 DS90UB941 & DS90UB948 I2C 设置
#define TI941_I2C_ADDR 0x10
#define DSI0_TI948_I2C_ADDR 0x34
static int ti941_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
。。。。。。。。。。。。。。。。。。。。。。。。
ti941->lvds_i2c = i2c_new_dummy(client->adapter , TI941_I2C_ADDR) ;
ti948->lvds_i2c = i2c_new_dummy(client->adapter , DSI0_TI948_I2C_ADDR);
Ti941_StartUp();
ti941_init(ti941);
}
DS90UB948 I2C 设备初始化可以参考 DS90UB941 部分
4.1.6 DS90UB941 寄存器配置
struct STi941_config ti941_para[] =
{
{0x03, 0x9a}, {0x05, 0x04}, {0x1e, 0x01}, {0x07, 0x32}, {0x08, 0x32}, {0x0d, 0x33},
{0x0e, 0x73}, {0x0f, 0x07}, {0x10, 0x33}, {0x11, 0x33}, {0x12, 0x00}, {0x14, 0x04},
{0x17, 0x1e}, {0x30, 0x00}, {0x4f, 0x8c}, {0x54, 0x00}, {0x56, 0x00}, {0x5b, 0x21},
{0x5c, 0x67}, {0x64, 0x70}, {0x65, 0x04}, {0x66, 0x03}, {0x67, 0x02}, {0x6e, 0x20},
{0x70, 0x30}, {0x77, 0x30}, {0x71, 0x94}, {0x78, 0x94}, {0x72, 0x96}, {0x79, 0x96},
{0x73, 0x90}, {0x7a, 0x90}
};
4.1.7 DS90UB948 寄存器配置
struct ti948_config ti948_para[] =
{
{0x03, 0x78}, {0x05, 0x1e}, {0x34, 0x01}, {0x1d, 0x19}, {0x1e, 0x39}, {0x1f, 0x03},
{0x20, 0x59}, {0x21, 0x55}, {0x23, 0x30}, {0x26, 0x15}, {0x27, 0x15}, {0x43, 0x03},
{0x49, 0xe2}, {0x64, 0x70}, {0x65, 0x04}, {0x66, 0x03}, {0x67, 0x02}
};
4.2 HannStar HSD123KPW2 屏幕参数配置
我们首先了解一下这块屏的 Timing
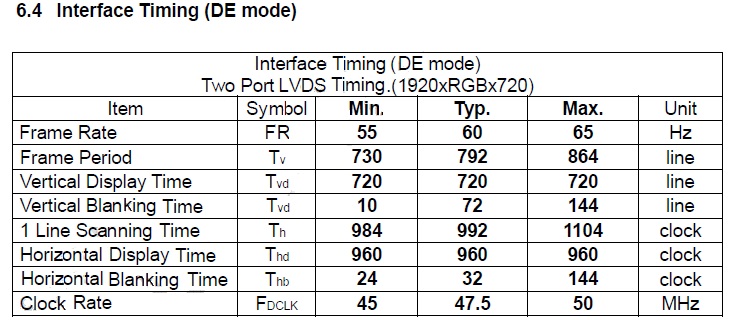
图7 hanstar hsd123kpw2 Timing
根据以上信息 ,我们在 vendor\nxp-opensource\kernel_imx\drivers\gpu\drm\panel 添加 panel-hanstar-hsd123kpw2.c 屏幕驱动
Panel 初始化 :
static int rad_panel_probe(struct mipi_dsi_device *dsi)
{
。。。。。。。。。。。。。。。。。。。。。。。。。。
videomode_from_timing(&rad_default_timing, &panel->vm);
if ( ret < 0 )
return ret;
drm_panel_init(&panel->base);
panel->base.funcs = &rad_panel_funcs; panel->base.dev = dev;
ret = drm_panel_add(&panel->base);
if (ret < 0)
return ret;
ret = mipi_dsi_attach(dsi);
if (ret < 0)
drm_panel_remove(&panel->base);
}
屏幕 Timing 设置 :
| static const struct display_timing rad_default_timing = { .pixelclock = { 75000000, 75000000, 75000000 }, .hactive = { 1920, 1920, 1920 }, .hfront_porch = { 40, 40, 40 }, .hsync_len = { 20, 60, 100 }, .hback_porch = { 220, 220, 220 }, .vactive = { 720, 720, 720 }, .vfront_porch = { 7, 7, 7 }, .vsync_len = { 10, 10, 10 }, .vback_porch = { 21, 21, 21 }, .flags = DISPLAY_FLAGS_HSYNC_LOW | DISPLAY_FLAGS_VSYNC_LOW | DISPLAY_FLAGS_DE_HIGH| DISPLAY_FLAGS_PIXDATA_NEGEDGE,}; }; |
4.3 i.MX8 MIPI 信号输出
修改 vendor\nxp-opensource\kernel_imx\arch\arm64\boot\dts\freescale\fsl-imx8qm-mek.dtsi
| diff --git a/arch/arm64/boot/dts/freescale/fsl-imx8qm-mek.dtsi b/arch/arm64/boot/dts/freescale/fsl-imx8qm-mek.dtsi +/* &i2c0_mipi_dsi0 { #address-cells = <1>; #size-cells = <0>; @@ -1479,6 +1483,23 @@ }; }; }; +*/ + +&i2c0_mipi_dsi0 { + #address-cells = <1>; + #size-cells = <0>; + pinctrl-names = "default"; + pinctrl-0 = <&pinctrl_mipi0_lpi2c0>; + clock-frequency = <100000>; + status = "okay"; + + ti941_bridge@3d { + compatible = "ti,ti941"; + reg = <0x3d>; + status = "okay"; + }; +}; + +/* &mipi_dsi_bridge1 { status = "okay"; @@ -1498,6 +1520,31 @@ }; }; }; +*/ + +&mipi_dsi_bridge1 { + status = "okay"; + + panel@0 { + compatible = "hanstar,hsd123kpw2"; + reg = <0>; + dsi-lanes = <4>; + panel-width-mm = <68>; + panel-height-mm = <121>; + + port { + panel1_in: endpoint { + remote-endpoint = <&mipi_bridge1_out>; + }; + }; + }; + + port@2 { + mipi_bridge1_out: endpoint { + remote-endpoint = <&panel1_in>; + }; + }; +}; |
五. 点亮屏幕

图8 点亮屏幕
对 Bumblebee 智能座舱 HSD123KPW2 屏幕进行调试 , 首先是打通 DS90UB941 和 DS90UB948 之间的通信 ,需要使能 1.8V 和 1.1V ,
设置 MODE_SEL 模式 ,这样可以打通 DS90UB941 和 DS90UB948 之间的通信 ,接着是对 DS90UB941 和 DS90UB948 进行初始化 ,
然后是设置屏的 Timing 和 MIPI 信号输出 ,通过以上内容相信大家已经了解怎样通过 Serdes 的方式调试 MIPI 信号输出的屏幕
六 参考文档
【1】 DS90UB941-q1.pdf SNLS640 –DECEMBER 2018
【2】 DS90UB948-q1.pdf ZHCSEN7A –OCTOBER 2014–REVISED JANUARY 2016
【3】 HSD123KPW2-A10 Formal Specification 2.0.pdf DC140-002917 Revision : 2.0
【4】 Android_User's_Guide.pdf Rev. automotive-10.0.0_1.1.0 — 24 March 2020
评论
hahaha123
7 个月前
Delver
2021年10月20日