

在图像边缘提取中,有一个十分重要的东西,那就是图像边缘识别,人类视觉在看到一个物体时是通过物体的轮廓来判断具体是什么的物体,那么在图像边缘识别就是模仿人类视觉的一个过程。
图像边缘识别的实质就是采用某种算法来提取图像中的对象与背景间的交线。对此可以把这种变化看作是《信号与系统》中与之对应“斜边信号”和阶跃信号,如下图1。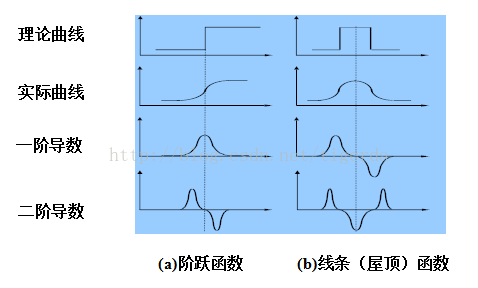
图1
图像的边缘变化就是实际曲线所示,通过数学求导可知,曲线变化率越大那么所求得的导数也就越大,于是可以得到如下一阶导数和二阶导数函数,这两种导数函数所代表就是目前图像边缘识别所使用的几种算法的代表,分别是使用一阶微分算子(Roberts算子、Prewitts算子,Sobel算子),以及第二种二阶微分算子(Laplacian算子)。
图像边缘识别一般是包括四个步骤:
1.图像滤波:
图像边缘检测算法因为主要是针对图像的一阶导数和二阶导数,而这些导数对于图像中的噪声十分的敏感,所以需要用到数字滤波器,滤除掉其中的噪声点。
2.图形增强:
黑白图像的表现,可以转换为矩阵中的数值,不同的数值代表不同的灰度值,在此处,可以设置一个阈值,对于超过此阈值的值,设定为灰度高极限值,低于此阈值的值,设定为灰度低极限值,突出图像变化的部分。
3.图像检测:
使用算子,计算出值,因为针对不同的地方所算出的梯度值(函数在改点沿方向变化最大),设置一个梯度阈值,对于超过此梯度阈值的可以判定为此图像的边缘,低于的判断为不是图像边缘。
4.图像定位:
主要是针对需要确定边缘位置的应用场合。
图像边缘识别是图像边缘提取中最为关键的部分,不同的算法对图像的边缘的细节的表现不同,特别是在OLED调试中针对mura的识别是尤为重要的,因为在对mura进行处理时,因为mura和正常亮屏部分灰度相差不大,所以在滤波和增强部分以及对于所使用算子计算出的梯度部分的阈值选取时尤为重要的。
图像边缘识别在NOVATEK的demura中广泛使用,在使用NT37xxx系列的产片调试中demura的调试都会用到此算法,该算法能够极大提升对于mura处理的精准度,提升整体屏幕的显示效果。
撰写人:roy.luo@aitgroup.com.cn
评论