

安装路径连结:
https://softwaretools.infineon.com/tools/com.ifx.tb.tool.ezpdhostsdk
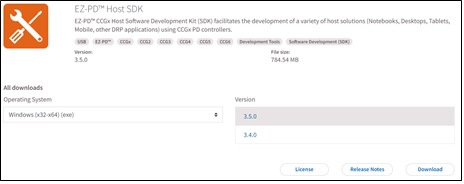
- 软体开发工具物件
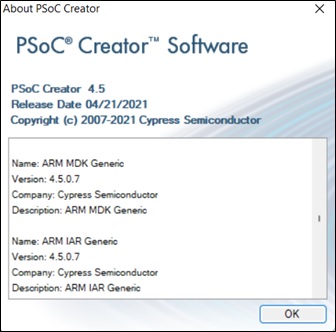
PSoC Creator 开发者环境
英飞凌的Type-C 控制器基于英飞凌的PSoC 4 可编程成系统架构, 其中包括可编程类比和数位模组、ARM Cortex-M0 内核和内建闪存记忆体.
PSoC Creator 开发环境用于配置CCGx 器件、开发和编译固件应用程序以及可选择使用 SWD对设备进行编程. 建议SDK需要PSoC Creator 4.5
(4.5.0.7) 或更新版本. 此版本的PSoC Creator可以与旧有的版一起安装和使用.
PSoC Creator 版本包括GNU ARM编译器工具.

Arm® MDK 编译器和工具
主机SDK中的所有参考方案都需要ARM MDK工具做编译 (https://www2.keil.com/mdk5/). 请从ARM 获得MDK工具链的许可来使用这些提供
的方案.
尝试使用PSoC Creator 提供的GNU ARM 工具来编译方案将会导致编译错误, 因为会超出设备闪存记忆体二进制容量的限制.
用于ARM芯片的GCC(GNU C Compiler)编译器有许多不同的变体, 现在Keil MDK 仍然支持GCC编译器的, 它属于GNU编译器
套件. GCC 是 GNU 推出的功能 强大、性能优越的多平台编译器, 是GNU的代表作品之一.
Python 手稿语言
USB4/Thunderbolt 主机参考方案在方案建制的最后 使用一串Python脚本作为二 进制文件的客制化. 这些Python脚本作为
构建过程, 本身一部分会被调用, 所以如 果Python是没有安装在电脑上, 会导致建构的失败.
请从(https://www.python.org/downloads/) 安装Python 3.7或更高的版本, 以确保 建构后的步骤可以正常动作

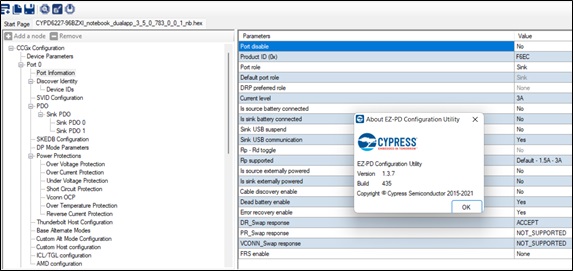
EZ-PD Configuration Utility
CCGx 设备附带一个预编程的引导加载程序, 允许韧体通过I2C 界面做更新, CC通道或USB界面, 属于Type-C接口的一部分. 主机SDK所有支持的部件可利用I2C引导
加载程序, 这意味着韧体更新是通过I2C界面完成的.
EZ-PD Configuration Utility是基于Windows的应用程序, 它可通过英飞凌引导加载程序界面 (I2C) 提供的套件 (DVK和EVK) 用于对CCGx设备来进行编程.
EZ-PD Configuration Utility 依赖于英飞凌USB 控制器, 该控制器可以通过I2C连到CCGx 器件来编程, 但需额外接英飞凌所提供的USB-I2C的桥接硬体设备.
EZ-PD Configuration Utility 还用于为CCGx 韧体应用客制化定义的配置, 包括支援的电源配置文件、保护方案等方面.
此版本的SDK需用最新的EZ-PD Configuration Utility 1.3.7版, 也可支援CCG2 CCG3、CCG4 、CCG5、 CCG5C、 CCG6、 CCG6DF 和CCG6xF的编程和配置.
- 硬体开发工具物件
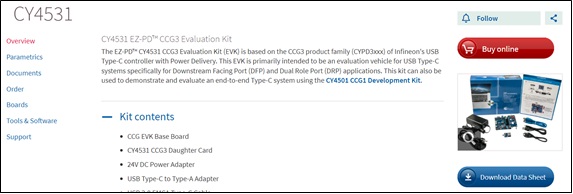
CY4531 开发套件
CY4531为CCG3韧体解决方案硬体套件.
CY4541 开发套件
CY4541为CCG4韧体解决方案硬体套件.
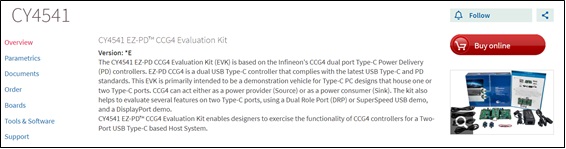
该套件使用CYPD4225-40LQXI控制器, 但只支援预设的USB-PD 2.0功能. 板上的CCG4可以用CYPD4126-40LQXI或CYPD4226-40LQXI作为替代.
英飞凌目前不提供CCG5、 CCG5C、 CCG6、 CCG6SF 或 CCG6DF的开发硬体套件. CCG5 CCG5C CCG6 CCG6SF 和 CCG6DF 可个别参阅规格书里的电路图
**资料来源 英飞凌原厂资料