

UWB 测距原理
无线定位基本概念
- 无线定位:通过对无线电波的一些参数进行测量,根据特定的算法来判断被测物体的位置。测量参数一般包括无线电波的传输时间、幅度、相位和到达角等。
- 基于三角关系定位技术:先要测量已知位置的参考点(A, B, C 三点)与被测物体之间的距离(R1, R2, R3),然后利用三角知识计算被测物体的位置。
l ToF:基于电磁波到达时间,换算出距离采样的定位模式
l TDoA:固定基站在精确同步的条件下,基于电磁波达到时间差,换算出距离差的定位模式
l 地图服务器: 在统一的坐标体系中,将(空间对象元素,位置信息)保存在后台地图数据库中,并按照一定比例尺通过地图界面统一展现。 - 定位精度: 地图上显示的位置,与终端实际物理位置的偏差值。
UWB技术
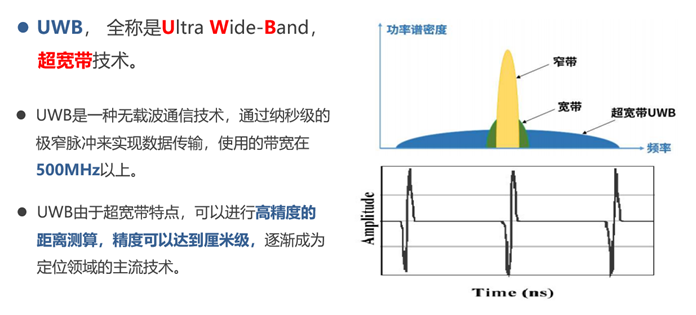
超宽带(Ultra Wide Band,UWB)技术是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。
UWB技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,尤其适用于室内等密集多径场所的高速无线接入。
UWB 特点
首先是超宽频,其频率覆盖从3G~5G,6G~10G 共7G 的频段,单信道带宽超过500MHz。
其次是功率低,按FCC 等法规,其输出功率被限制在-41dBm/MHz,按单个信道500MHz计算,其信道功率为-14.3dBm。

UWB频域图
再其次,超短脉冲,维持时间为零点几纳秒
UWB时域图
全球可用的频段分布表如下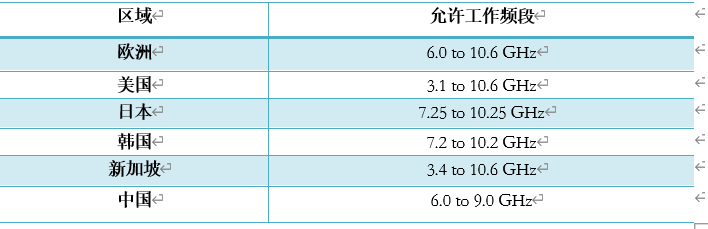
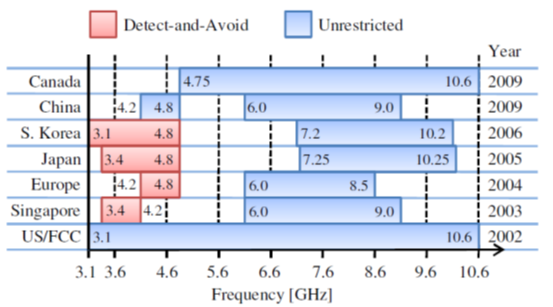
各国UWB工作频段
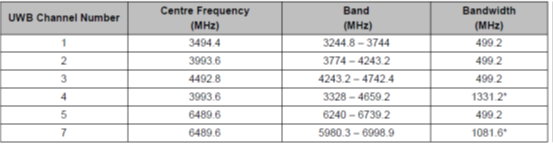
信道划分中,有两种信道,一种是500MHz 信道,另外一种为1GHz 信道,目前主要采用500MHz 信道。即信道1、2、3、5 这四个信道。
输出功率和法规
FCC 的规定,最高不超过-41dBm/MHz.
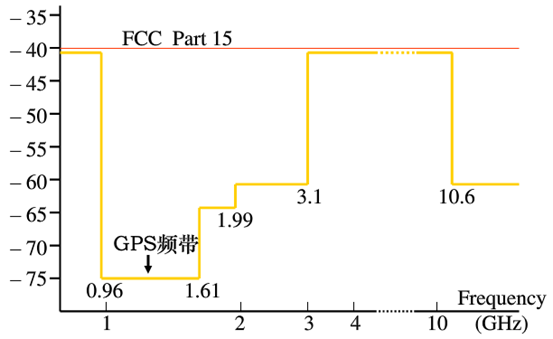
FCC规范
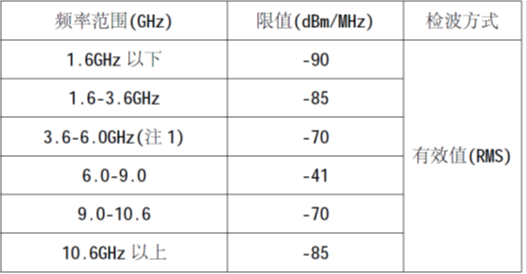
中国的功率规定:
DW1000 提供三种不同的工作速率,为110Kbps,850Kbps,6.8Mbps,在不同频率和不同速率下,对应的灵敏度不同。
测试条件:25℃
丢包率:1%
频率偏差: ±10%

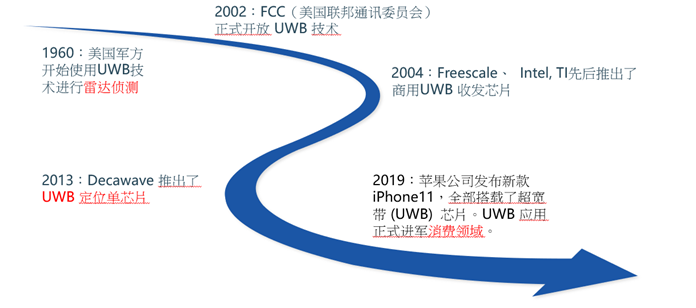
UWB 的发展
UWB 测距原理
- TOF
ToF传感器使用微小的发射器发射红外光或者激光,其中产生的光会从任何物体反弹并返回到传感器。根据光的发射与被物体反射后返回传感器之间的时间差,传感器可以测量物体与传感器之间的距离
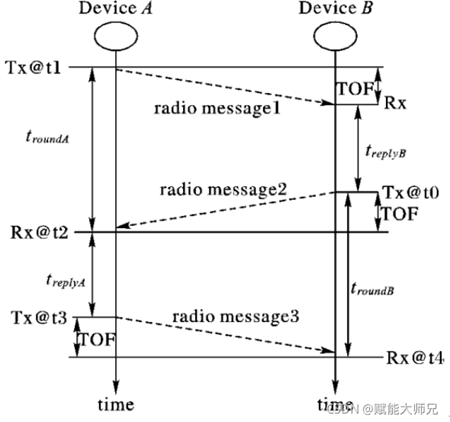
上图所示为双向测距过程: 设备A作为测量距离的发起者发起测距请求,设备B作为响应者响应和侦听设备A发起的无线电消息。A给B发送一个无线电消息并记录它的发送时间戳t1,B收到信息后并在一个特定时时延treplyB 后发送一个回复给A,当A收到回复并记录一个接受时间戳t2后,再经过一个特定的时延treplyA 发送一个无线电消息给B并记录发送时间戳t3,最后B接收到信息并记录时间戳t4。 由于往返时间皆已知,则可以得到:troundA= treplyB + 2TOF = t2 - t1 troundB = treplyA + 2TOF = t4 - t0
则信号的飞行时间为: TOF = (troundA - treplyA + troundB-treplyB)/4
注:radio message2 在troundA和troundB的计算中引入了两次,所以最终计算飞行时间需要除以4 不是3.,有人会疑惑为什么要计算多次取平均值,首先任何定位都只能精确不能准确,都存在误差的,且UWB 在传播中也存在多路径效应,反射和吸收,这些都会对精度产生一定影响,通过以上方法取平均值能使精度最大化。UWB 定位原理
ToF
AP1~AP3,分别指的是3个Anchor。
当Tag与3个Anchor完成测距后,就会有3个对应的距离值d1~d3。以Anchor为圆心,3个圆相交与1点即为Tag所在位置,这是一种理想模型。实际情况是,3个基站的距离在三维中实际是3个球相交。大多数情况,由于测距本身有误差,所以3个球相交的是一个区域。算法要做的就是在这个区域范围内取一个最接近标签真实位置的解。
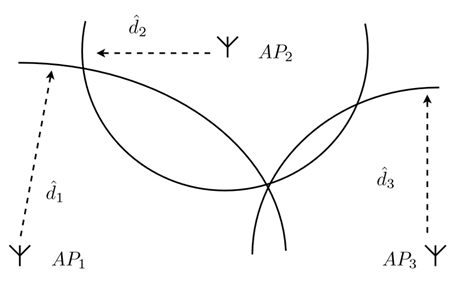
三点定位原理
TDoA
Master(主)基站发送sync(同步)报文,Slaver(从)基站接收并做同步处理。
Tag(标签)发送poll报文,基站接收并记录时间戳。
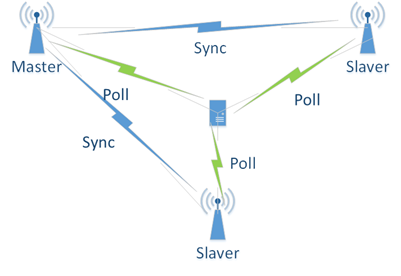
TDoA基站无线同步
AP1:记录的poll到达时间为T1
AP2:记录的poll到达时间为T2
AP3:记录的poll到达时间为T3
由于AP1、AP2、AP3时间是同步的,所以
DT1=T1-T2,AP1与AP3之间的时间差DR1=C*(T1-T2),画双曲线1
DT2=T1-T3,AP1与AP2之间的时间差DR1=C*(T1-T3),画双曲线2
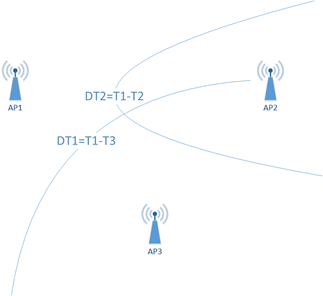
TDoA定位原理
【参考资料】
1、UWB 通信原理
2、无线测距定位原理
3、电子发烧友
★博文内容均由个人提供,与平台无关,如有违法或侵权,请与网站管理员联系。
★文明上网,请理性发言。内容一周内被举报5次,发文人进小黑屋喔~