

一. 原由
说明 NXP Smart Car Access 提供 PC 方案执行 BCM 定位演算模拟,但目前没有 CAN Bus 整合功能,所以使用 CADS5.2 软体包,初步完成 BCM 透过 CAN Bus 执行测距与基本定位演算,可作为后续客户开发 BCM 时技术交流的参考。
二. CADS5.2 CAN Bus 实现与框图说明
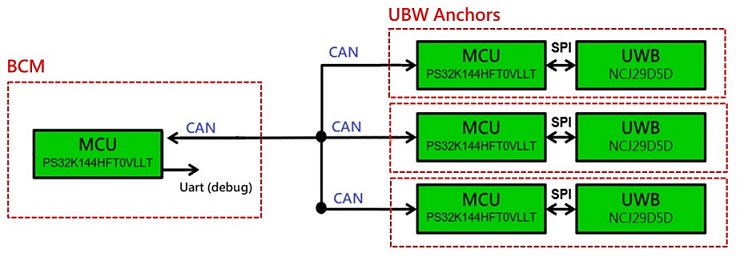
1. BCM 启动测距与基本定位演算架构框图
如图所示
2. 功能控制流程框图
(1) PC 或 BCM 透过 CAN Bus 测试与验证控制流程框图
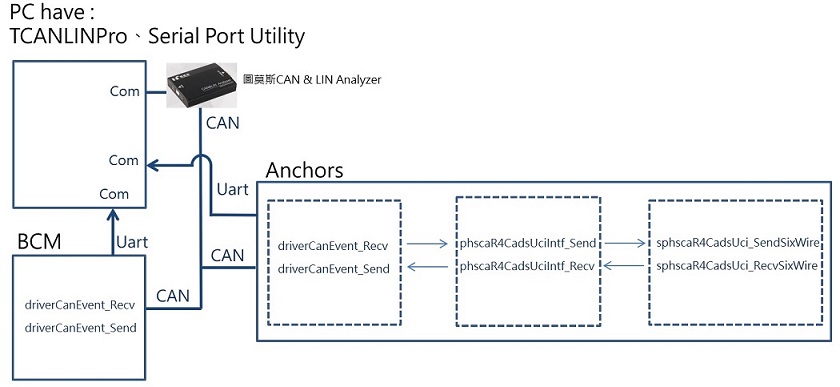
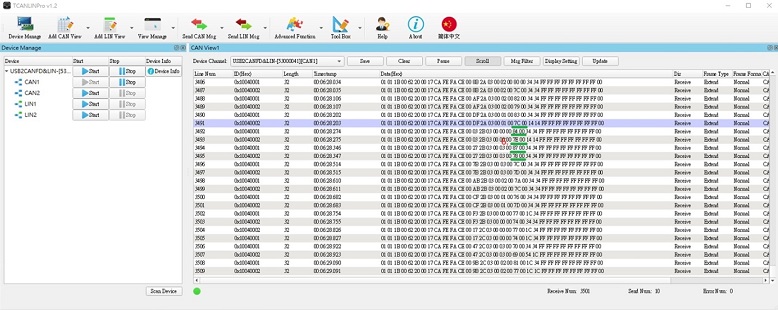
■ PC 端 :
使用 TCANLINPro v1.2 工具,目地是为了模拟 CAN Bus 传送资料和模拟总线接收到所有讯息以便除错与查阅,如下图所示:
■ BCM 端 :
透过 driverCanEvent_Send 功能下达 UCI command 对 Anchors 启动测距。
透过 driverCanEvent_Recv 收到 Anchors 测距的数据后开始进行定位演算。
■ Anchor 端 :
UWB 将 SPI 功能状态资讯透过 driverCanEvent_Send 回传给 BCM。
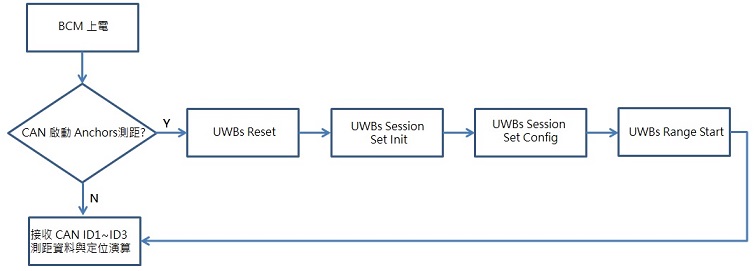
(2) BCM 控制流程框图
BCM 端的控制流程为上电后启动 Anchors 执行测距与定位演算。
三. CADS5.2 CAN Bus 实现与框图说明
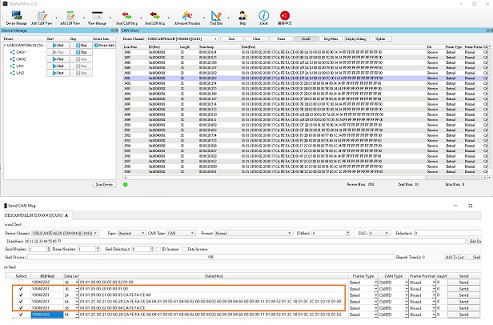
如下图所示为 CAN Bus 资料流,说明 CAN ID 与 Data 资料组合方式
图一. 为 CAN Bus 准备要传送 UCI Command 的资料
图二. 为 CAN Bus 接收到 UCI Command 的资讯
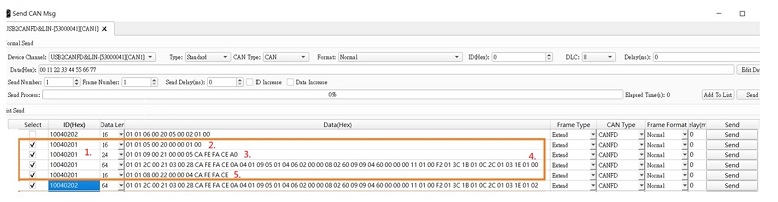
图一
图二
1. CAN ID 格式
图一中标示 1. CAN ID(10040201)所示的资料格式内容如下图说明:
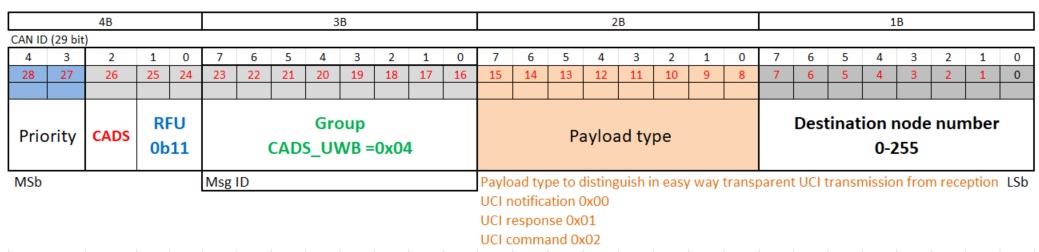
1B:为 UWB CAN Node Index
2B:为 UWB 的 UCI Command 资料型态
3B:为 Group 型态,而 0x04 内容为 CADS_UWB 设定
4B:26b 值为 0 属 CADS,28b&27b 为 Priority bits,28b 此设置为 1
范例:
10 04 02 01 : 即为 Anchor node index 1 的 UCI command
10 04 02 02 : 即为 Anchor node index 2 的 UCI command
2. Data 格式
图一项目 2.~5. 和图二项目 6. 为 UCI Command,而资料内容考量到如果超过 200 笔资讯长度时的使用方式,所以将资料切割成3种资料栏位型态,说明如下: 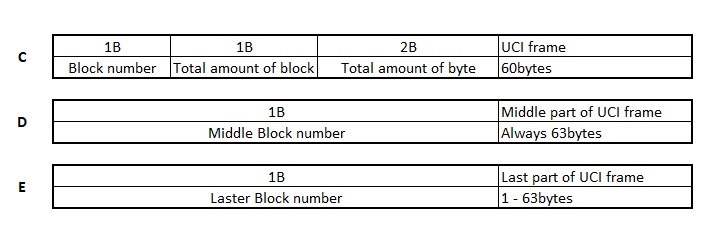
■ CAN FD 资料总长度为 64B
■ CAN FD 资料内容如果小于 60 笔,需将资料传送型态为 C 栏位
■ CAN FD 资料内容如果小于 123 笔,需将资料切割成 2 种型态即为 C+E 栏位
■ CAN FD 资料内容如果超过 200 笔,需将资料切割成 3 种型态即为 C+D+E 栏位
(1) 范例为图一项目 2. 的 C 栏位格式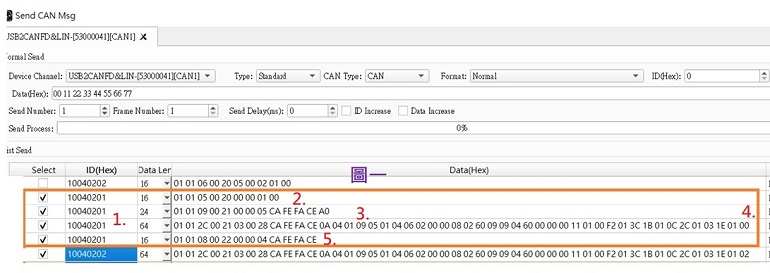
范例:
01 01 05 00 20 00 00 01 00
01 为 Block number
01 为 Total amount of block
05 00 为 0x05 是 UCI frame 资料笔数
20 00 00 01 00 为 UWB Reset 设定
(2) 范例为图二项目 6. 的 C 栏位格式
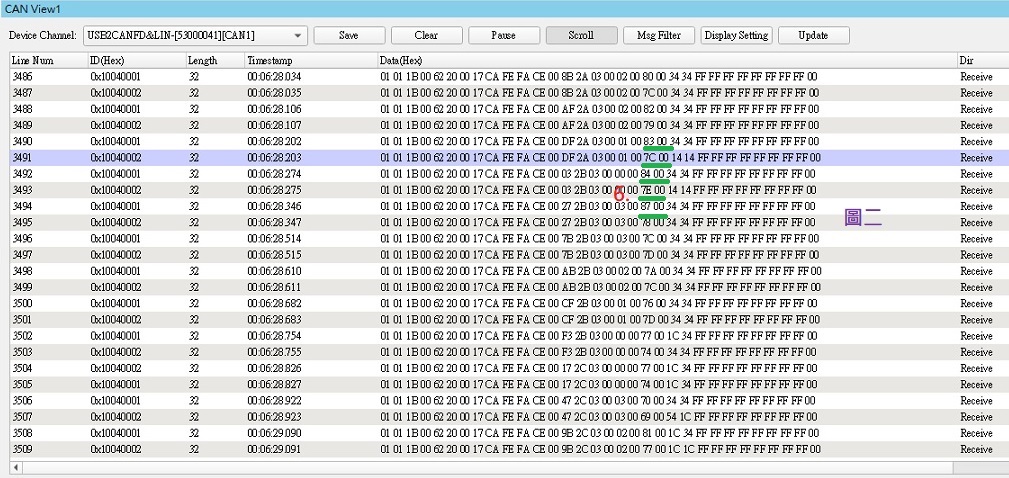
范例:
01 01 1B 00 62_20 00 17 CA FE FA CE 00 DF 2A 03 00 01 00 83 00 34 34 FF FF FF FF FF FF FF FF
01 为 Block number
01 为 Total amount of block
1B 00 为 0x1B 是 UCI frame 资料笔数
62_20 00 17 CA FE FA CE 00 DF 2A 03 00 01 00 83 00 34 34 FF FF FF FF FF FF FF FF
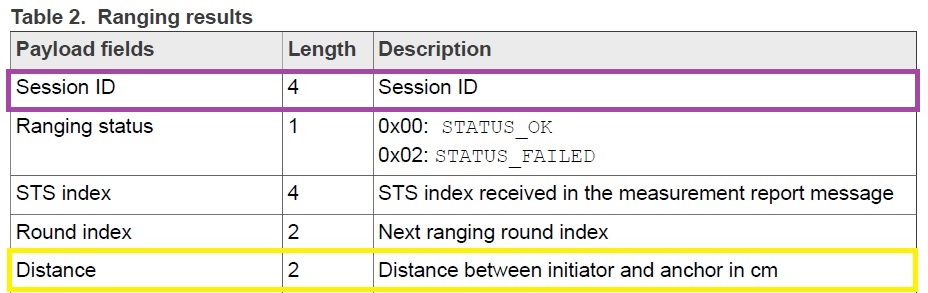
内容所示为 UWB Anchor 与 Key Fob 之间距离值
以上说明为 CADS5.2 CAN Bus 资料传送与接收的使用方式技巧哦~
四. 文件参考1.NCJ29D5_CADS_User_Manual.pdf
2.UWBMAC-GUI-QuickStartGuide.pdf