

1. 前言
一般电源在 DC-DC 降压控制分成电压环与电流环,电流环的速度一定会比电压环快,对于输出的滤波电容,电压是电流的积分,所以电流环的结果要经过好几个周期后才会在电压讯号有反应。
电压模式控制是将实际的输出电压值当作反馈信号,与命令电压相比计算出误差值,将误差值输入 PI 控制器,然后由 PI控制器输出相对应的 PWM duty 来稳住输出电压。
电压模式控制有个缺点,因为只有单一电压环路,当输出电压或负载有任何变化都必须经过回授再由电压环路来校正,它的响应速度会比较慢。
所以对于负载变化较大的条件下,电流模式控制的响应速度会比电压模式快速,让输出电压稳定。
但是峰值电流模式控制当 PWM Duty设计大于 50% 时,当有一个扰动 ( 例如负载变化 ) 会发生次谐波震荡,导致不稳定,以下会用电感电流与PWM 的关系图来说明 PWM Duty 大于 50% 时为何会发生次谐波震荡以及解决办法。
2. 峰值电流控制 : 次谐波震荡 ( Sub-harmonic Oscillation )
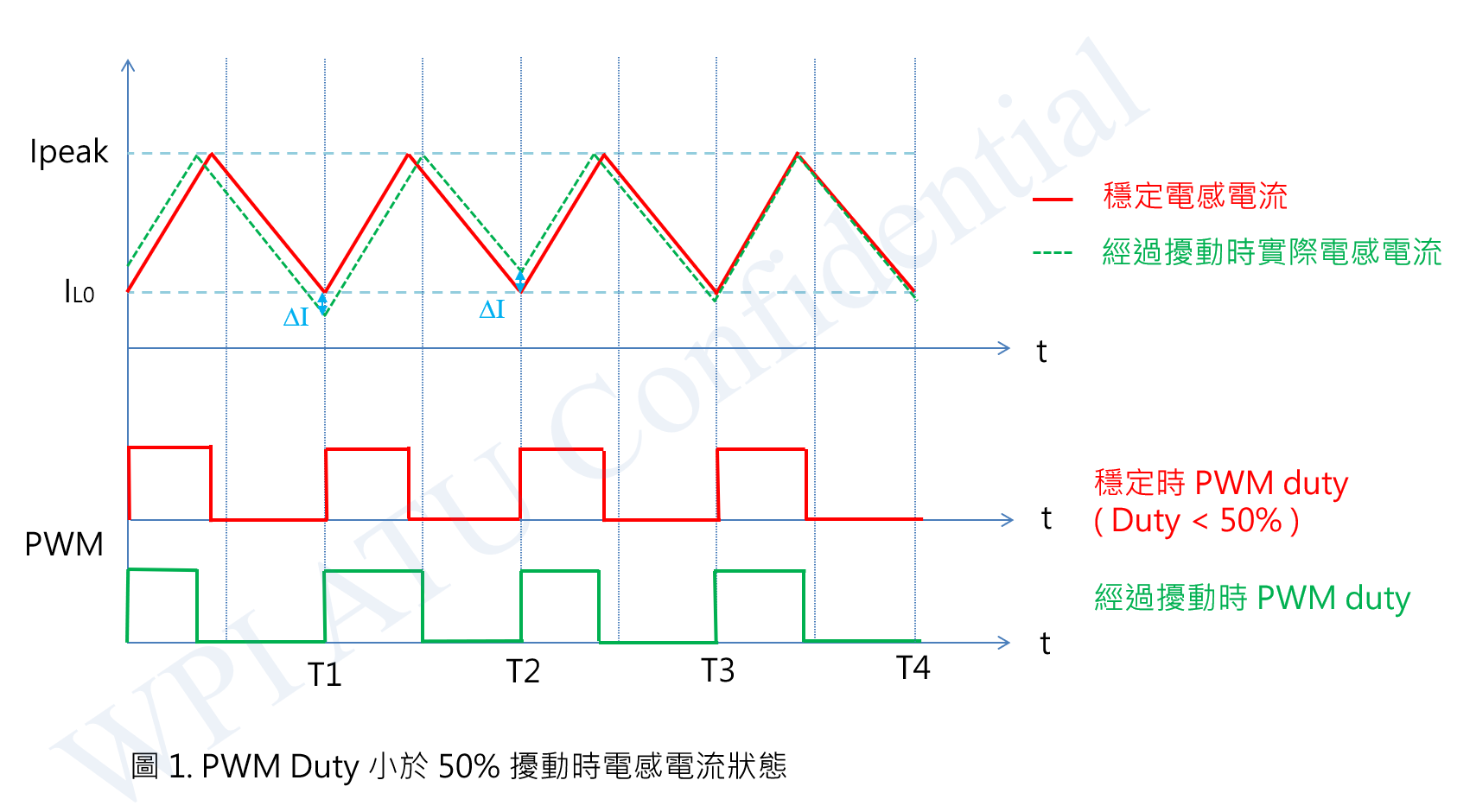
峰值电流模式控制当操作在PWM duty cycle 小于 50% 的条件下 ( 如下图 1 ),原本在一个稳定的电感电流波形 ( 红色实线为电感电流 )。负载如果有变化,电感电流受到一个扰动 ( 绿色虚线 ),经过几个 PWM 周期后,扰动就会自动收敛趋近为零,让系统维持在稳定的状态。
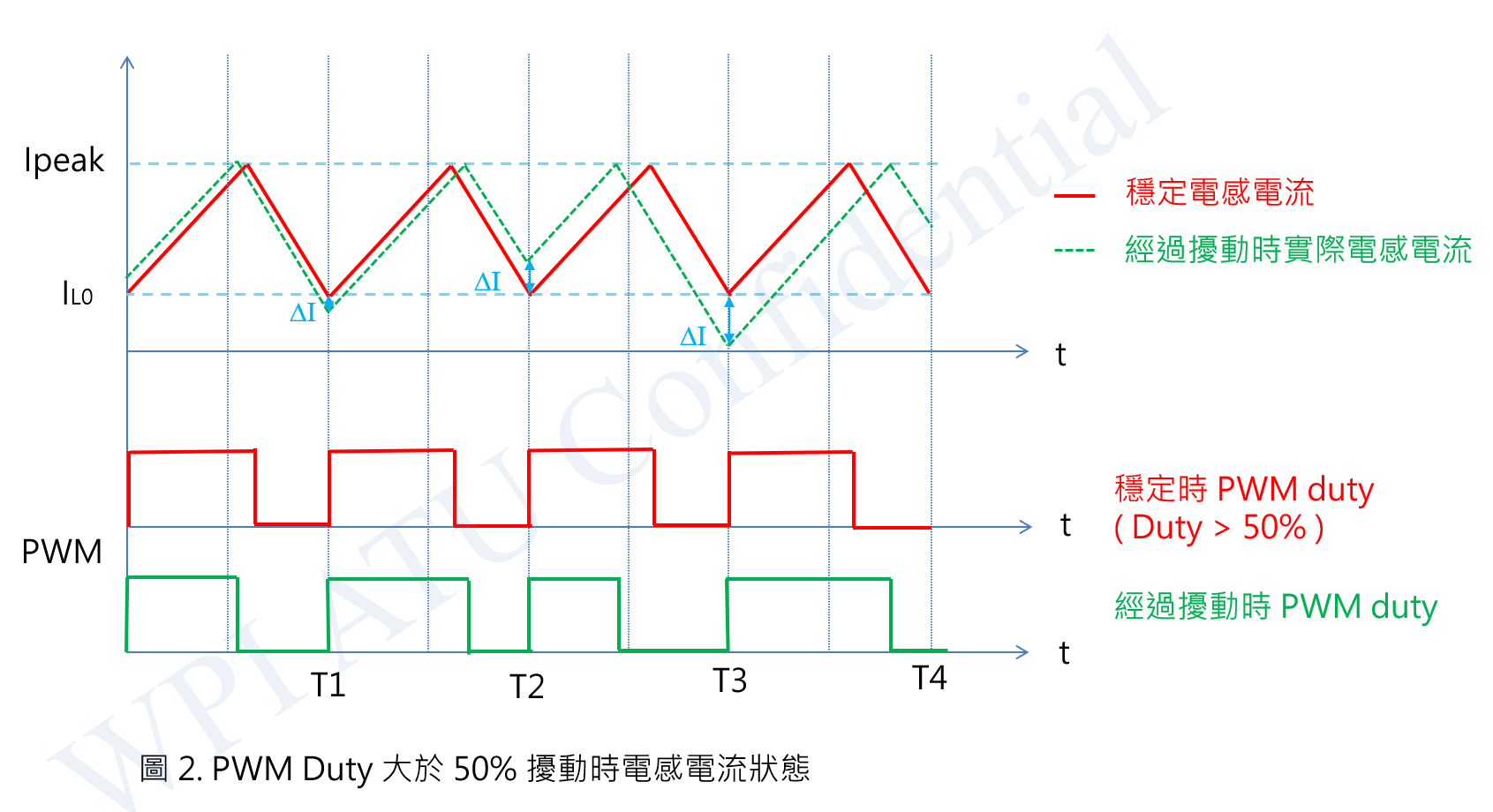
峰值电流模式控制当操作在PWM duty cycle 大于 50% 的条件下 ( 如下图 2 ),当有负载变化造成 PWM 控制的扰动,经过几个 PWM 周期后,实际电感电流与稳定电感电流误差会越来越大 ( ∆I 会越来越大 ),造成 PWM duty 有大小波的现象,造成系统不稳定,这个现象我们称为次谐波震荡 ( Sub-harmonic Oscillation )。
3. 峰值电流控制 : 斜率补偿 ( Slope Compensation )
电流控制模式虽然优于电压模式控制,但是在 PWM Duty 大于 50% 时会产生次谐波震荡( Sub-harmonic Oscillation ) 导致系统不稳定。要解决次谐波帐荡造成的系统不稳定况状,我们可以加上斜率补偿 ( Slope Compensation ) 技巧来解决次谐波震荡问题。
斜率补偿的作法是在控制电路中加入斜率补偿电路,或是透过 MCU 内部产生负斜率讯号,在PWM 周期开始时加入一个负斜率讯号,再与实际的电感峰值电流讯号做比较,使电流控制模式的 PWM Duty 大于 50% 时一样可以稳定动作,不会造成PWM Duty 变化过大导致无法收敛。
如下图 3,当PWM Duty大于50% 时加上斜率补偿功能,如果有一个扰动 ( 例如负载变化 ),电感电流经过几个周期之后会自动收敛回复稳定。
4.总结
在电源应用里面,很多时候都会使用到峰值电流模式来做控制,补偿速度会比较快。
但是使用峰值电流模式控制当 PWM 周期大于 50% 时,系统就会开始震荡不稳定,发生次谐波震荡 ( Sub-harmonic Oscillation ),而解决的办法就是加入斜率补偿 ( Slope Compensation ) 功能来解决次谐波震荡。
此篇文章就用 PWM 与电流图示让读者理解次谐波震荡 ( Sub-harmonic Oscillation ) 与斜率补偿 ( Slope Compensation ) 基本观念。
评论