

1. 概述
S32K 系列皆有支持 Model base design 的功能, NXP 也提供 MBDT ( Model base design Toolbox ) 可以方便客户快速导入模组化开发,并且包含常见应用设计。
此文件介绍使用 S32K144 EVB 完成六步方波控制与测试基于 Model base design,测试部分 NXP 也提供 SIL & PIL 的测试资源,此文件说明 SIL & PIL 原理与 PIL 示范测试步骤。
NXP S32K 也提供 AutoSar Mcal 相关 model ,可以导入 Vector/EB tresos AutoSar base software layer & AutoSar os & AutoSar RTE ,协助客户开发 AutoSar 基于 Model base design 。
NXP S32K PIL 测试基于 MATLAB / Simulink 详细操作影片可以参考大大通上 WPI 与钛思科技合作的影片内容 ( WPI & Terasoft NXP S32K MBDT_PIL 操作影片 )。
2. S32K1_MBDT
2.1 S32K & SBC model
S32K144 提供模组包含针对 SBC ( PMIC ) 的驱动 Model ,周边 ADC, ACMP, CAN-Bus, I2C, SPI, UART, LIN, FlexIO, FlexTimer model 与 DMA, LPIT, eeprom, flash, RAM, Watcgdog, RTC model 提供给客户运用,不用再建置相关 model ,大幅减少开发时程。
2.2 Library model
NXP S32K 也提供 Model base design 相关数学, 滤波与马达控制 block 供客户使用以下说明 Library 所包含的内容
- Mathematical Library Model : ABS, ADD, SUB, DIV, MUL, MAC, Shifting, F16/F32/FLT Conversion
- General Function Library : SIN, ASIN, COS, ACOS, TAN, ATAN, LUT, LOG, Ramp, Hysteresis, Limit, Plp and Plr controllers
- General Digital Filters Library : FIR, IIR1, IIR2, Moving Average
- General Motor Control Library : Park/Clark Direct & Inverse transformations, Space Vector Modulation, PMSM Decoupling, DC Bus Ripple Elimination
- Advanced Motor Control Library : BackEMF Observer, Tracking Observer, Speed and Current Loops
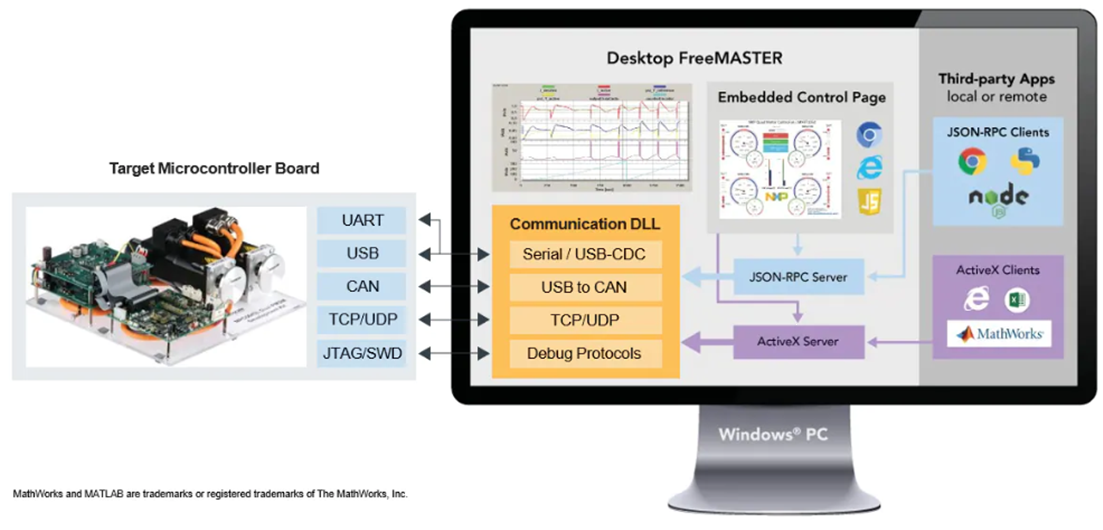
2.3 FreeMASTER model
Freemaster 为 NXP 开发的图形化 GUI 界面,可以利用 CAN-Bus 或者 UART 搭配转 USB 的硬体,将 MCU 的参数变数资料丢出,并且可支持图形化示波器功能,让客户可以知道时间上的参数变化,可以应用在许多领域,例如马达控制器参数调适,图形化电流、转速、d-q 轴转换值,可以最大化方便客户调适控制器参数。
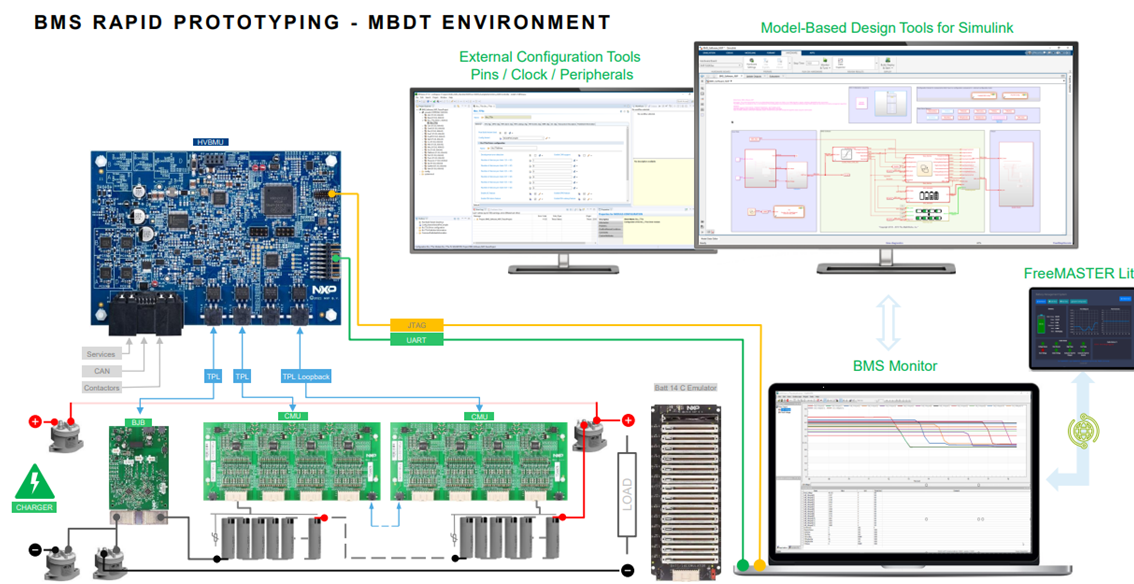
2.4 S32K BMS example
NXP 提供 S32K 基于 Model base design 开发的 BMS 应用,可搭配 EBtresos AutoSar Model 完成 BMS 应用符合 AutoSar 规范,NXP 也提供完整 BMS 硬体开发板,借由 Model base design 除了 NXP的 model 外,也可参考MATLAB/SIMULINK 提供 BMS 相关的算法 model ,大幅降低设计难易度专注开发 BMS 算法,另外也可增加 NXP freeMASTER Model 使用 CAN-Bus or UART 通讯即时使用电脑端监控电池态,调整算法参数。最后 NXP也提供 SIL & PIL 测试参考,符合车用开发的测试需求,从设计到验证,加快 BMS 产品开发流程。
2.5 S32K PMSM/BLDC example
NXP 提供 PMSM & BLEC 马达相关应用的 Model base design example 基于 NXP 马达开发平台,基于 S32K 的周边 Model 搭配 NXP 马达控制 Library Model ,建立马达应用的设计,提供 FOC 架构马达控制,PID 控制 Model ,无速度感测估算 Model ,V/F 马达控制,位置估测,六步方波,Hall sensor 回授,马达速度,电流控制等等,供客户马达所需的 model ,也可自行开发部分 Model ,大幅降低马达应用开发流程与 SIL & PIL 测试。
下图为 NXP S32K144 PMSM 马达控制应用 Model base design
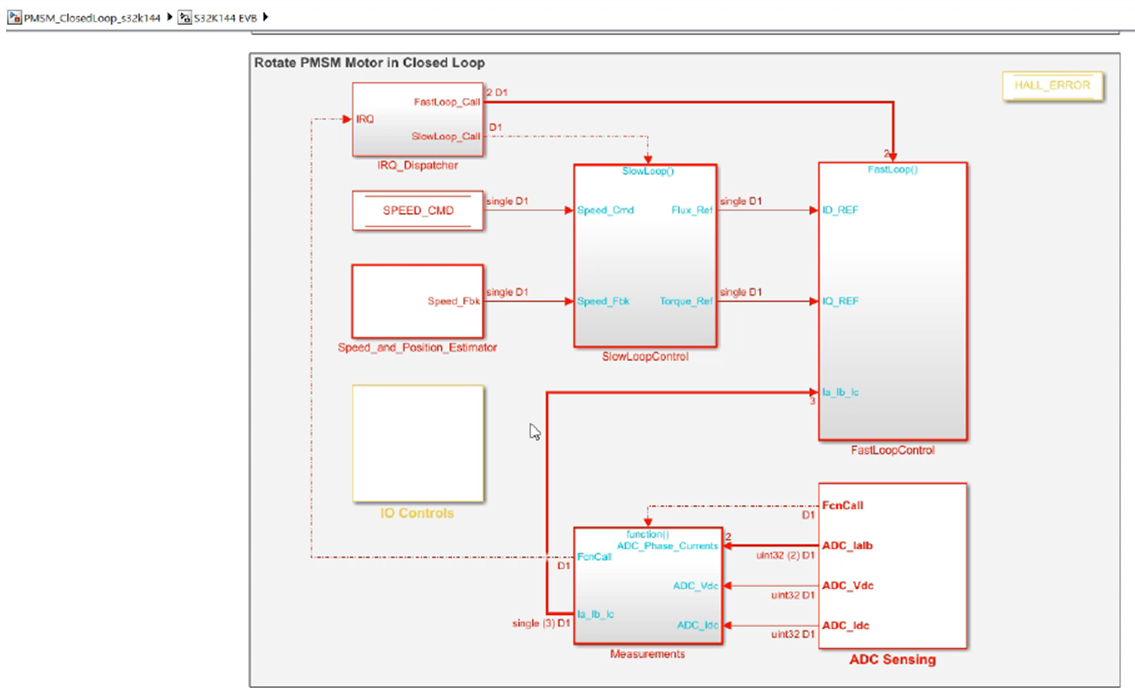
下方为 NXP PMSM & BLDC 控制 Model 功能的整理
3. S32K1_SIL 测试
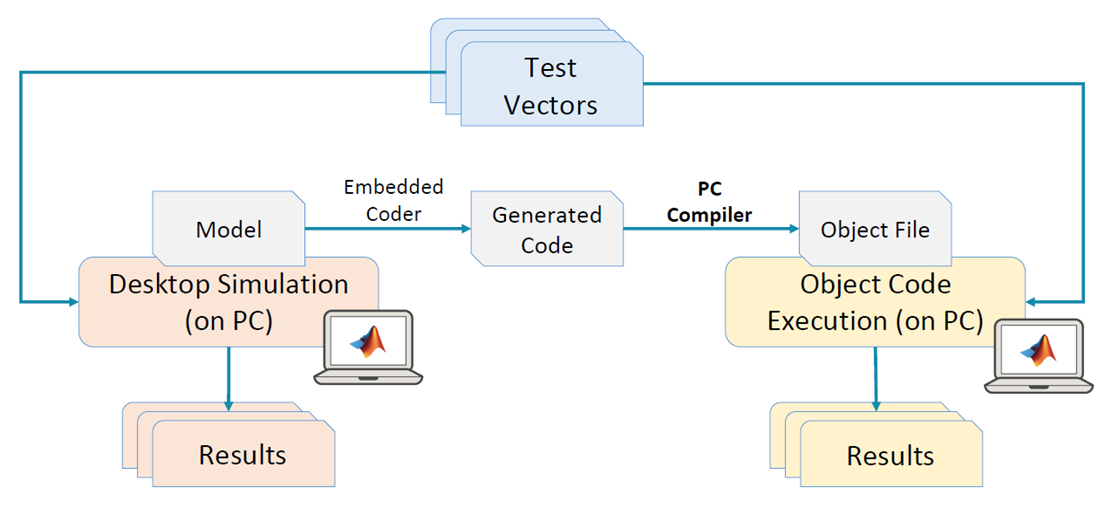
SIL 全名 Software in the loop ,如下图所示,运行两种状态,输入测试项目 ( Test Vectors ) 后,Model 运行后的输出必需要等于使用 Model 所产生的程式码 ( 例如C code ) ,所有测试项目输出都一致后代表 SIL 测试成功 ,此测试不需要硬体,只需要电脑运行 MATLAB 撰写 Test Vectors 进行测试即可。
4. S32K1_PIL 测试
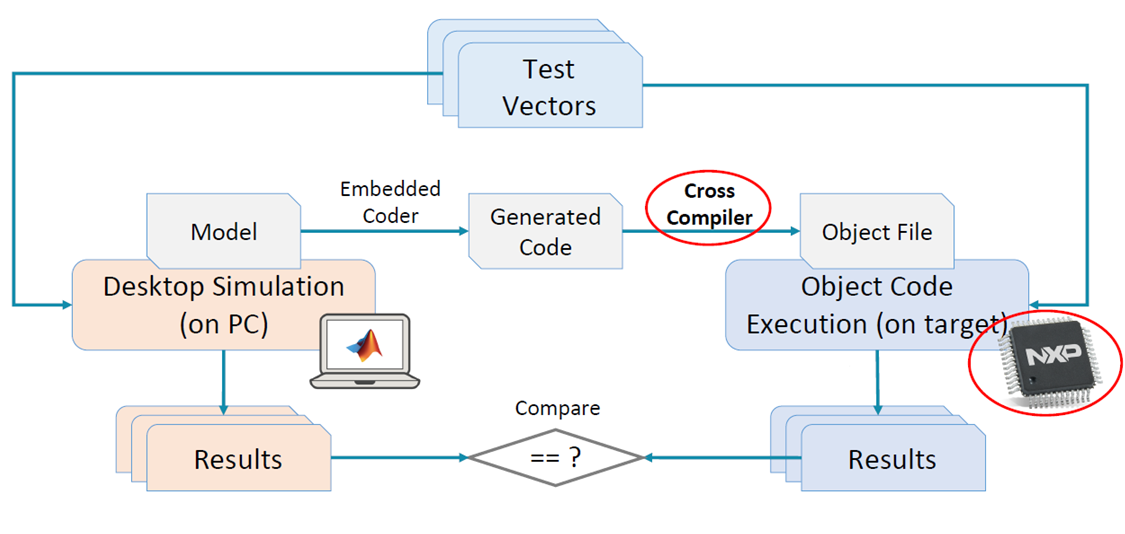
PIL 全名 processor in the loop ,如下图所示,可以知道跟 SIL 差异如下方红框,PIL 需要使用烧录器将 Model 转成的程式码 ( 例如 C code ) 烧录至 NXP 芯片中,运行结果则透过 UART ( 注 : S32K 为例 ) 丢回电脑端,MATLAB 比对结果,整体结果正确PIL 测试就算通过,NXP 已经将 S32K UART 与 MATLAB 之间配置完成,客户不需再开发 PIL 通讯与比较模块,可以快速导入 PIL 测试。
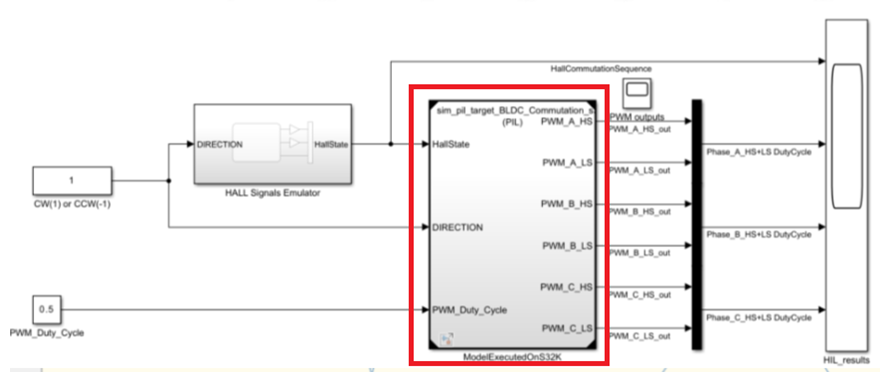
5. S32K1 六步方波 PIL 测试范例
如何导入 NXP S32K MBDT 请参考 “NXP Model Based Design Toolbox with S32K1xx 环境建设” 大大通博文,载入 NXP MBDT 后,开启六步方波 PIL 测试范例,如下图示
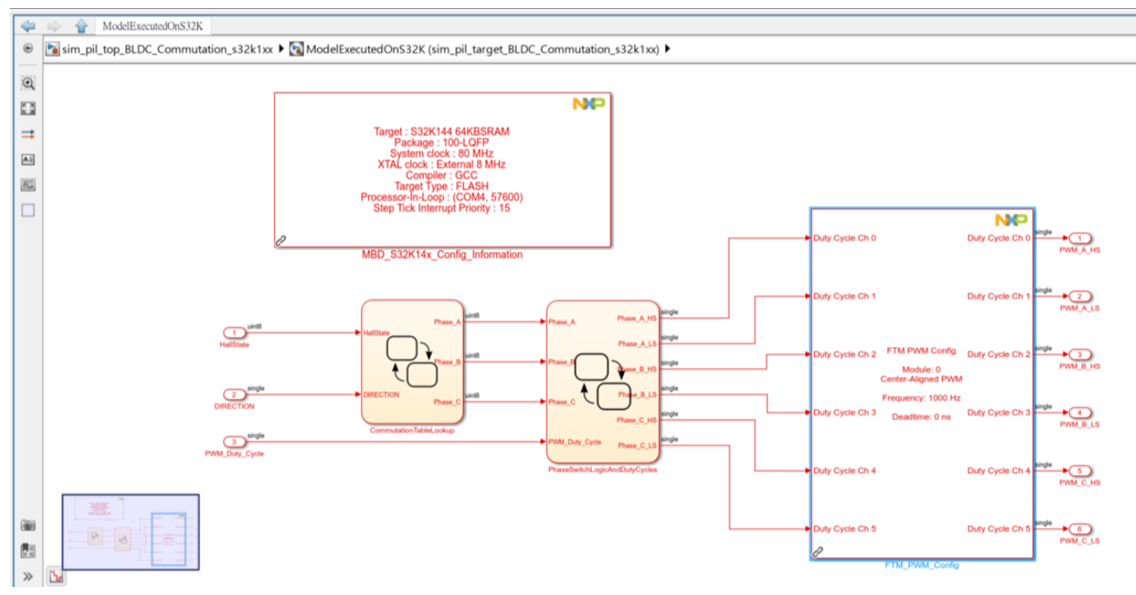
点选下方框图,可以进入更底层的 model
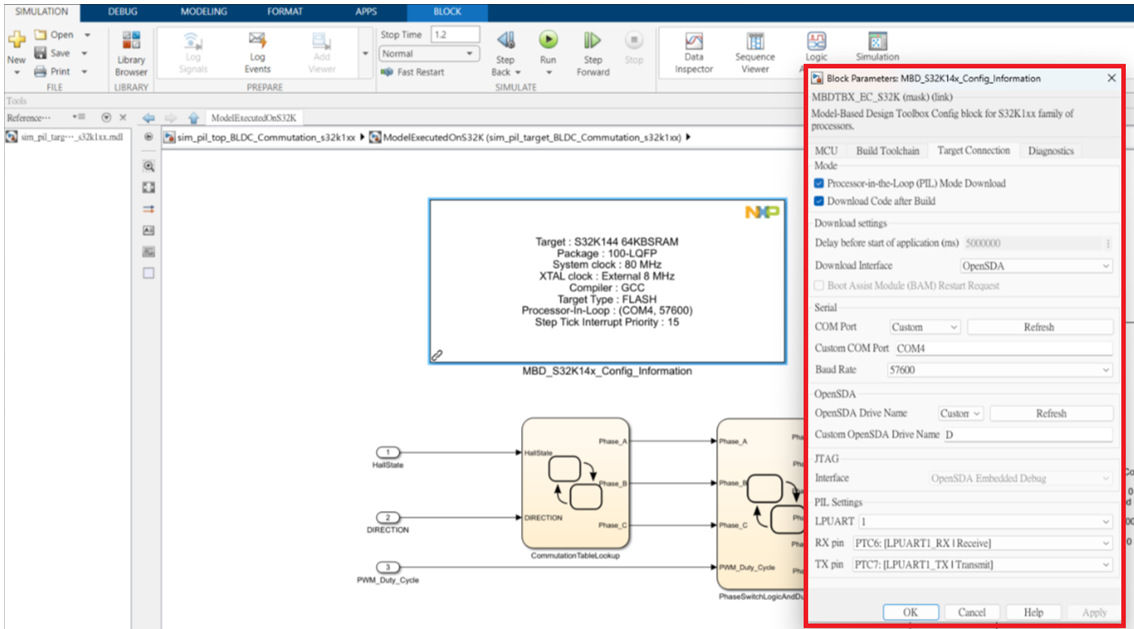
点选后如下方图示,可以配置 Model 的设定
配置 PIL 通讯界面 LPUART 如下图
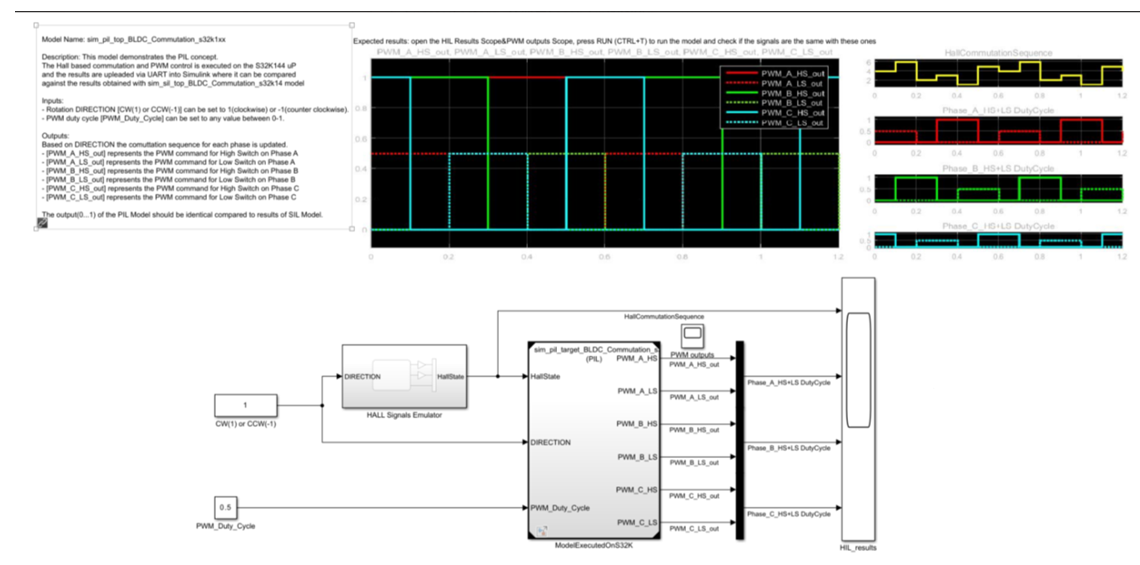
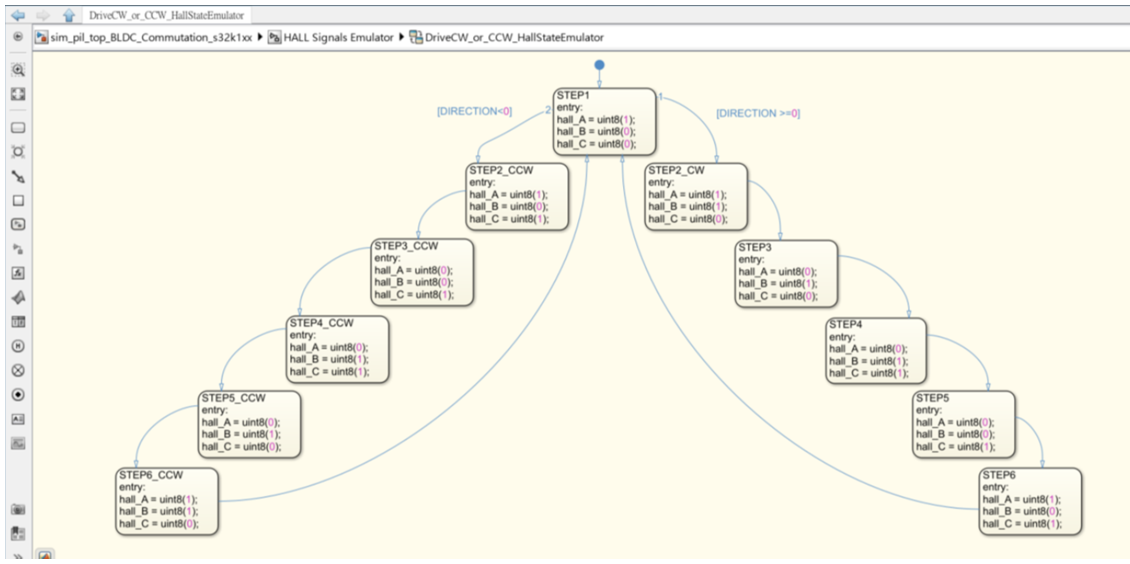
此 PIL 的 Test Vectors 为 Hall sensor 输入的 6 个状态和正反转,如下方所示
最后完成 PIL 测试,得出 PWM 输出结果一致,可用 MATLAB/SIMULINK 将结果显示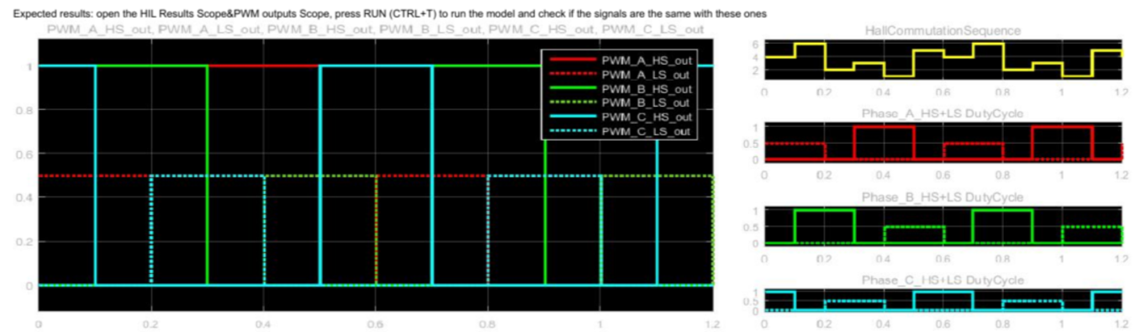
6. 参考文献
MBDT-S32K-Release-Notes
https://www.nxp.com/docs/en/release-note/MBDT-S32K-Release-Notes.pdf
TP-GET-TO-KNOW-PIL-VALIDATION-AND-VERIFICATION
https://www.nxp.com/webapp/Download?colCode=TP-GET-TO-KNOW-PIL-VALIDATION-AND-VERIFICATION
TP-SPEED-UP-BMS-APPS-MBDT
https://www.nxp.com/webapp/sps/download/preDownload.jsp?render=true
评论