

一、引言
本文前半部分主要讲述了 NJJ29C2 CADS GUI 的安装和使用,后半部分讲述了如何配置 CADS 上位机实现钥匙 IMMO HT3 认证。
二、安装 NJJ29C2 CADS GUI
1、点击网址:v0.30.0 | nwjs2,下载 nwjs-v0.30.0-win-x64.zip,如图 1 所示。
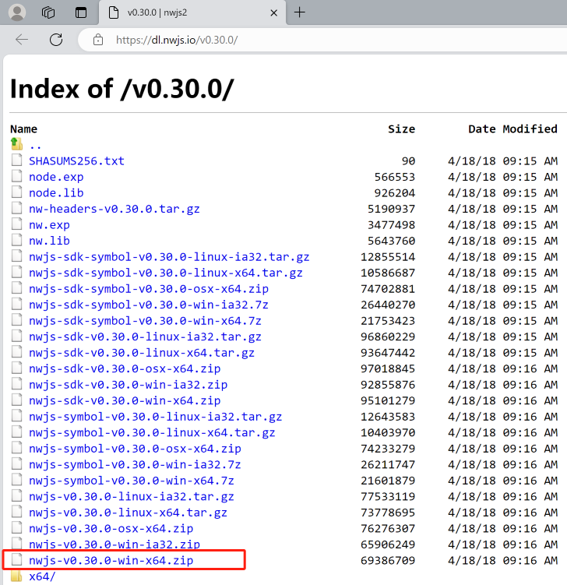
图 1 下载 nwjs-v0.30.0-win-x64.zip
2、解压“NJJ29C2_CADS_4.4.zip”(需要到 NXP 官网申请下载)&“nwjs-v0.30.0-win-x64.zip”,将“njj29c2cadsgui.exe”复制到“nwjs-v0.30.0-win-x64”文件夹中,双击打开,如图 4 所示,至此,NJJ29C2 GUI 上位机安装完成。
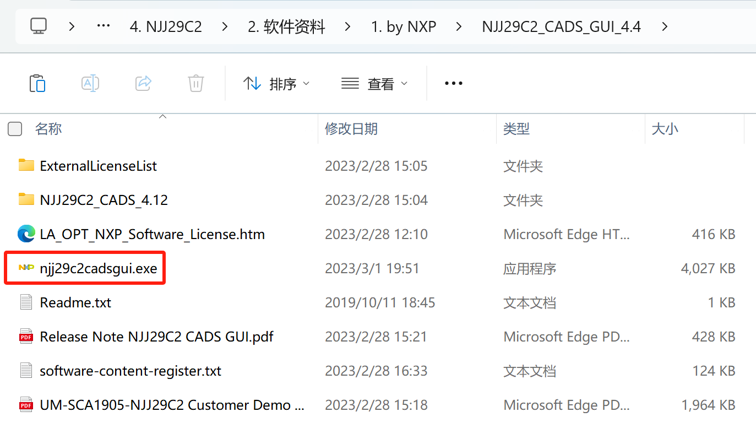
图 2 NJJ29C2_CADS_4.4
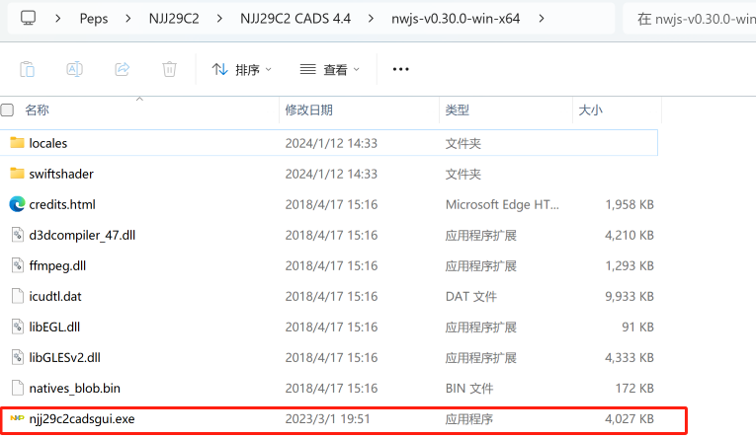
图 3 NJJ29C2 CADS GUI 软件
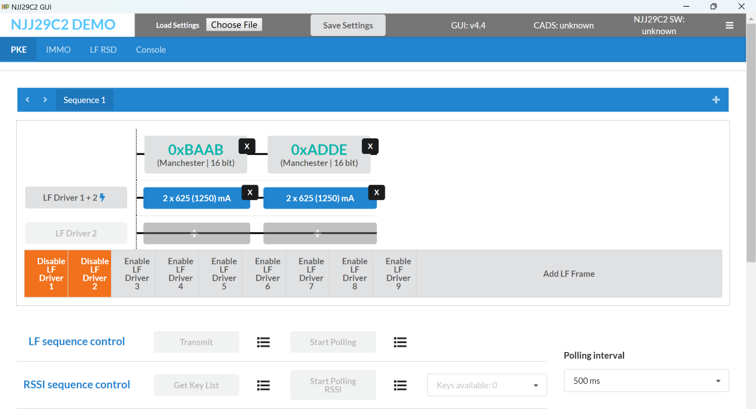
图 4 NJJ29C2 GUI 初始界面
三、NJJ29C2 GUI 使用
1、按照图 5 所示,连接硬件,并使用软件 J-Flash 将 “NJJ29C2_CADS.bin” 文件烧录到 WPI 低频板,如图 6 所示。
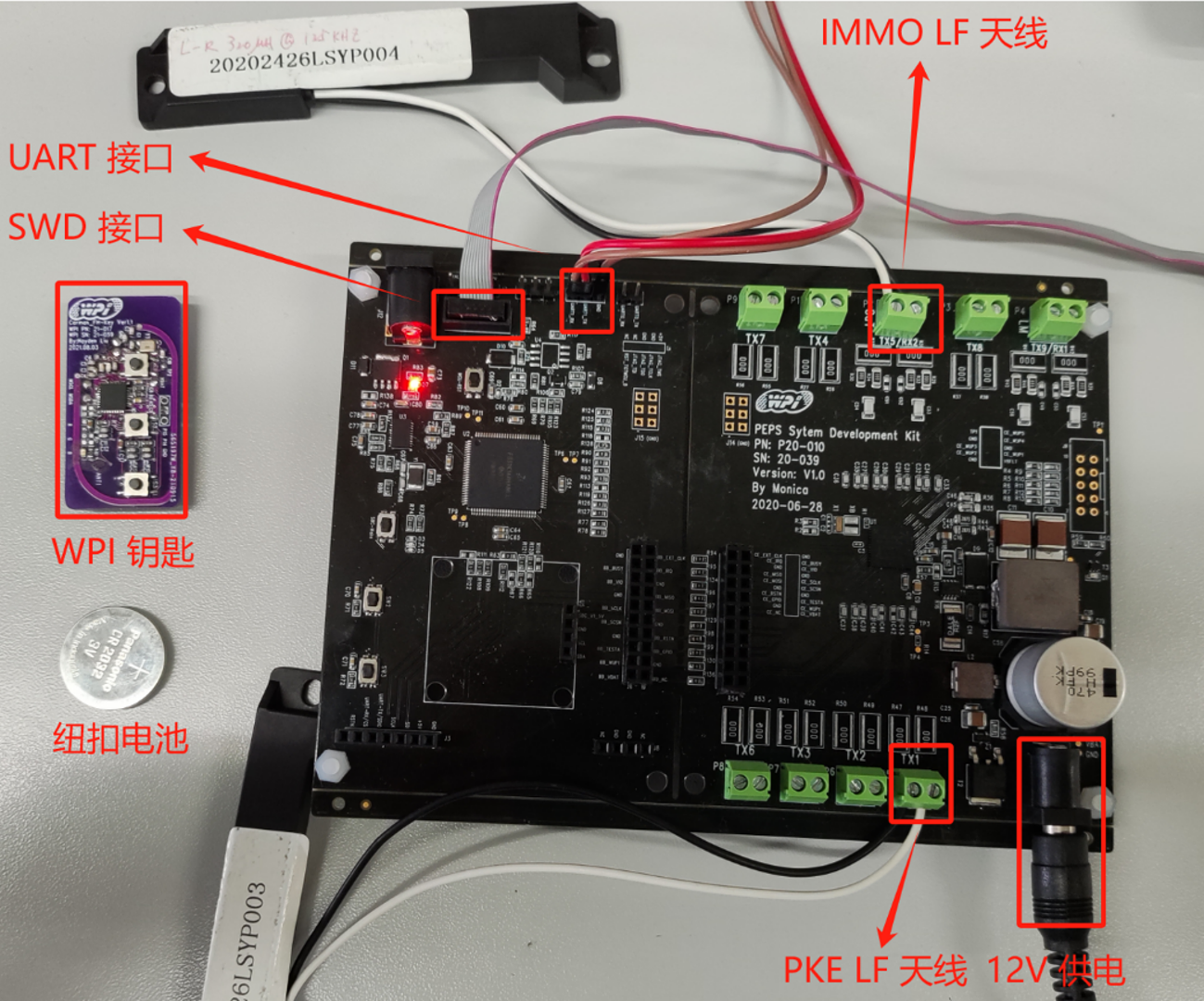
图 5 硬件连接图
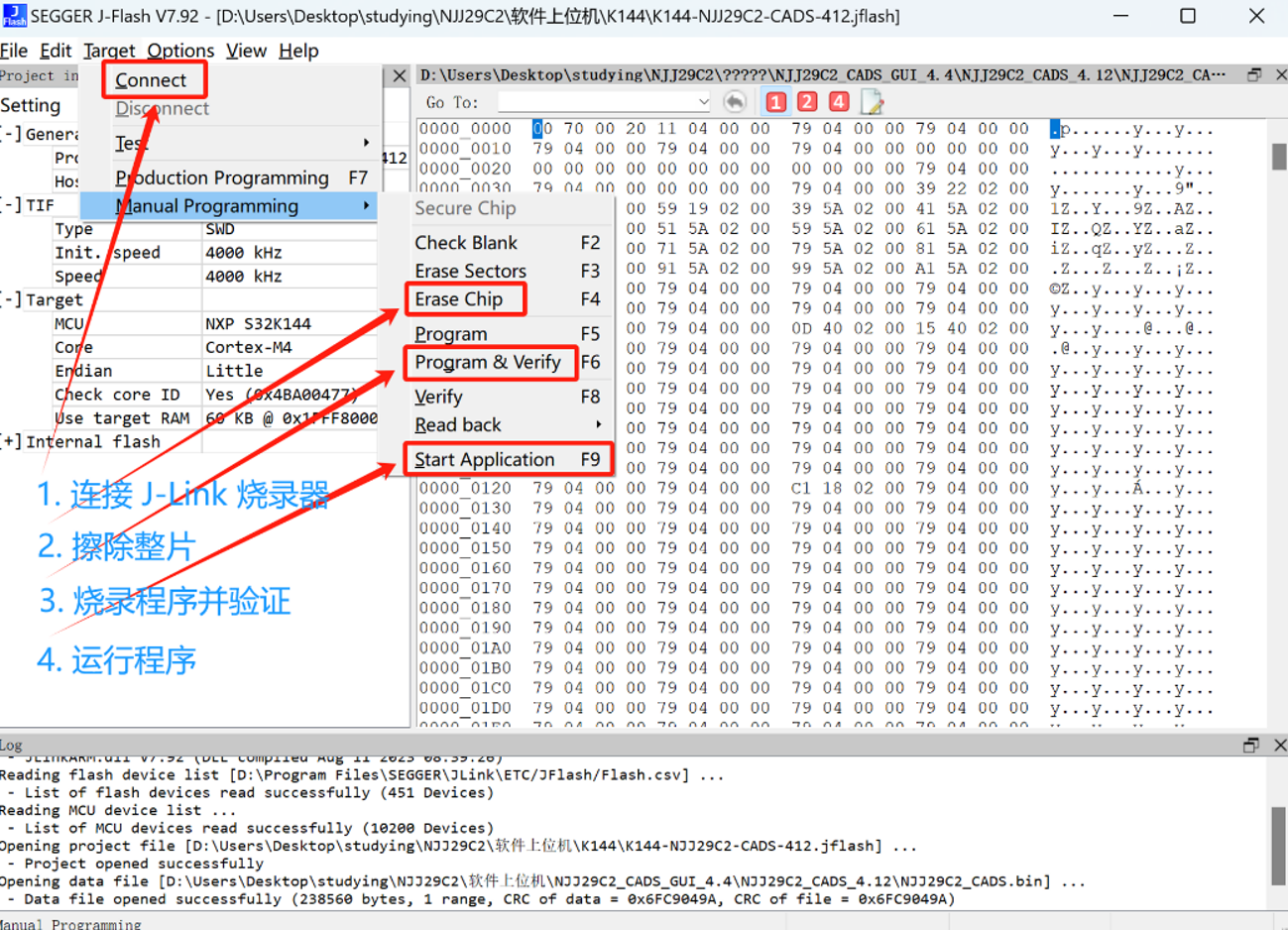
图 6 烧录 NJJ29C2_CADS.bin 文件
2、按下 WPI 低频板复位按键(MCU-RST),CADS 上方显示对应版本信息,且 Console 界面的 Communication 有串口打印数据,如图 7 所示。
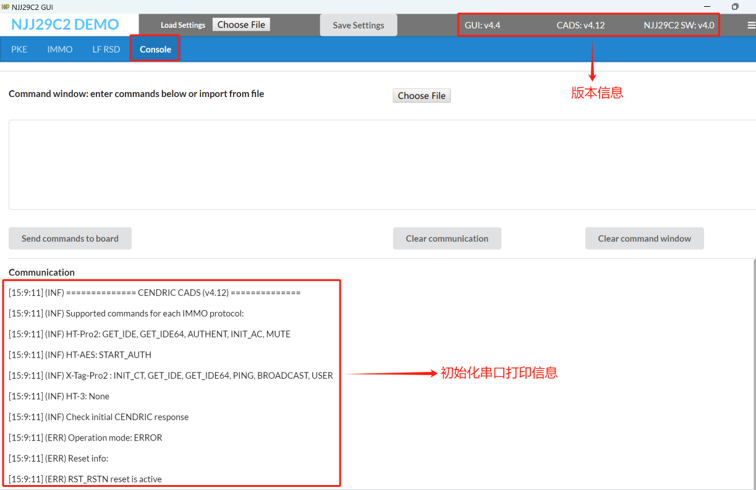
图 7 NJJ29C2 GUI 初始化界面
3、如图 8 所示,NJJ29C2 GUI 可以刷新 & 选择串口,PKE 界面中可以配置 LF 天线参数,配置完成之后,可点击对应模式生成对应的配置命令。

图 8 PKE 界面说明
4、在 Console 界面,按下“Choose File”可以选择示例文本,通过“Send command to board”发送配置命令。
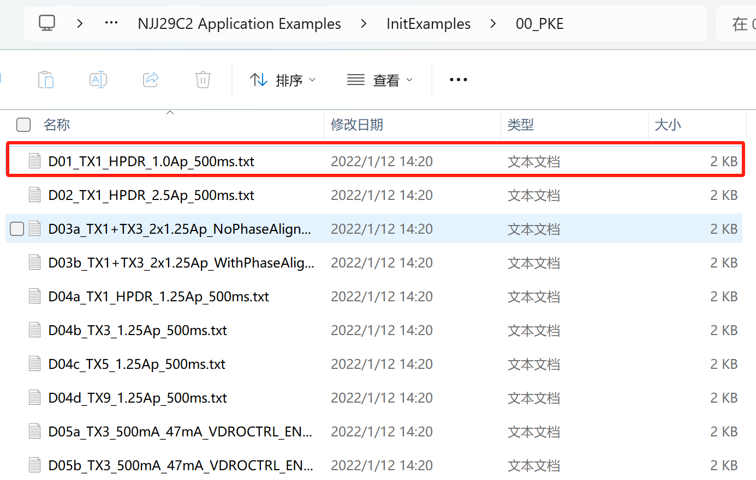
图 9 示例文本
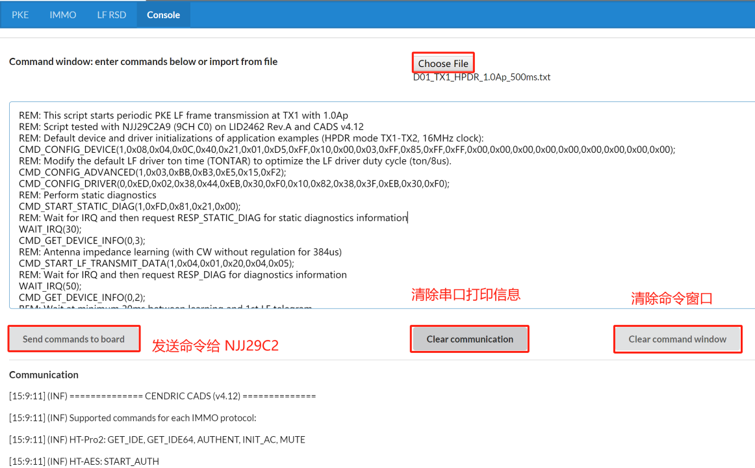
图 10 Console 界面说明
四、IMMO HT-3 认证
1、初始化配置 NJJ29C2,驱动天线 TX5/RX2,IMMO 类型为 LM,驱动电流为 0.5A。
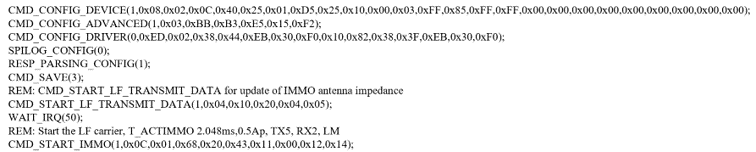
图 11 初始化配置命令
【注意】IMMO 驱动天线配置电流过大将导致 NJJ29C2 无法辨别 NCF29A1 回传的 LF 数据,建议设置驱动电流为 0.5A。
2、根据 IMMO HT3 认证协议,配置 NJJ29C2 驱动低频天线发送对应命令,其中 NCF29A1 IMMO HT-3 认证流程如图 13 所示。
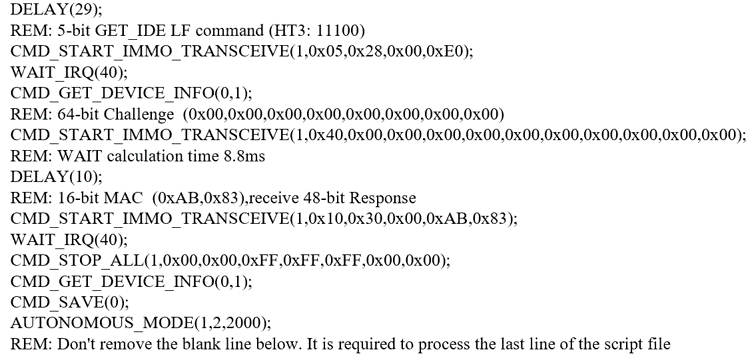
图 12 IMMO HT-3 认证命令
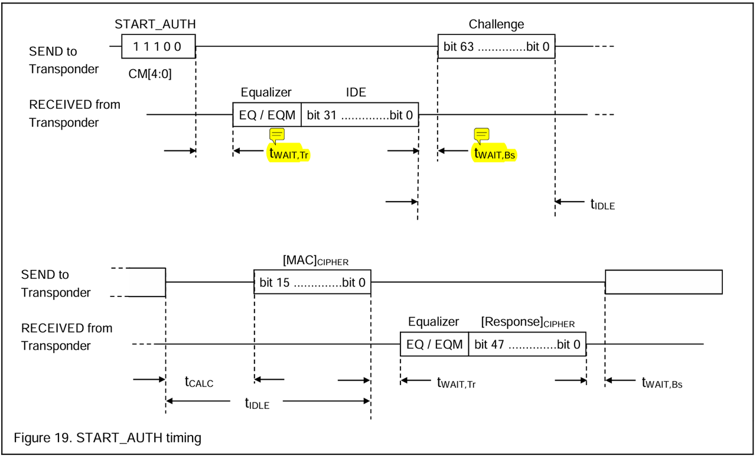
图 13 IMMO HT-3 认证流程
3、复制代码(附录有完整代码)到 NJJ29C2 DEMO 对应的 Console 界面,点击 “Send command to board”,发送串口命令,可以在 Communication 获取到 NCF29A1 对应的 32bits IDE & 48bits Response,如图 15 所示。
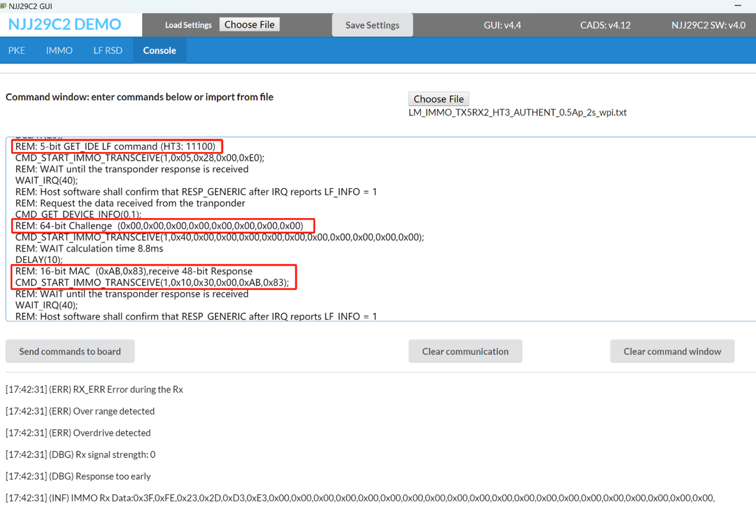
图 14 Console 界面
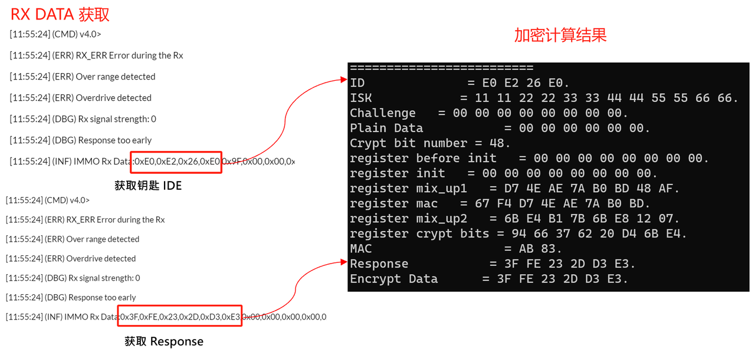
图 15 NCF29A1 IDE & RESPONSE 获取
五、参考文献
[1] UM-SCA2010-NJJ29C2 CADS User Manual.pdf
[2] UM-SCA1903-NJJ29C2 Customer Demo Operation.pdf
[3] UM-SCA1905-NJJ29C2 Customer Demo Operation GUI.pdf
[4] S32K144 CADS 调试 - 大大通(简体站) (wpgdadatong.com.cn)
六、附录
IMMO HT-3 认证代码
REM: Script tested with NJJ29C2A6 (6CH C0) on WPI LF Board and CADS v4.12
REM: Deviation to default device initialization: PHASEALIGN_DSBL = 1, IMMO ICOILMAX_INIT = 3A, ICOILMAX_OP = 6A
CMD_CONFIG_DEVICE(1,0x08,0x02,0x0C,0x40,0x25,0x01,0xD5,0x25,0x10,0x00,0x03,0xFF,0x85,0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00);
REM: Modify the default LF driver ton time (TONTAR) to optimize the LF driver duty cycle (ton/8us).
CMD_CONFIG_ADVANCED(1,0x03,0xBB,0xB3,0xE5,0x15,0xF2);
CMD_CONFIG_DRIVER(0,0xED,0x02,0x38,0x44,0xEB,0x30,0xF0,0x10,0x82,0x38,0x3F,0xEB,0x30,0xF0);
REM: Disable SPI logging to avoid extension of the LF activation time due to UART
SPILOG_CONFIG(0);
RESP_PARSING_CONFIG(1);
CMD_SAVE(3);
REM: CMD_START_LF_TRANSMIT_DATA for update of IMMO antenna impedance
CMD_START_LF_TRANSMIT_DATA(1,0x04,0x10,0x20,0x04,0x05);
REM: Wait for IRQ to get information about success of LF transmission for antenna impedance learning
WAIT_IRQ(50);
REM: Start the LF carrier, T_ACTIMMO 2.048ms,0.5Ap, TX5, RX2, LM
CMD_START_IMMO(1,0x0C,0x01,0x68,0x20,0x43,0x11,0x00,0x12,0x14);
REM: Transponder boot time + margin
DELAY(29);
REM: 5-bit GET_IDE LF command (HT3: 11100)
CMD_START_IMMO_TRANSCEIVE(1,0x05,0x28,0x00,0xE0);
REM: WAIT until the transponder response is received
WAIT_IRQ(40);
REM: Host software shall confirm that RESP_GENERIC after IRQ reports LF_INFO = 1
REM: Request the data received from the tranponder 32-bits IDE + 8-bits CRC
CMD_GET_DEVICE_INFO(0,1);
REM: 64-bit Challenge (0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00)
CMD_START_IMMO_TRANSCEIVE(1,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00);
REM: WAIT calculation time 8.8ms
DELAY(10);
REM: 16-bit MAC (0xAB,0x83),receive 48-bit Response
CMD_START_IMMO_TRANSCEIVE(1,0x10,0x30,0x00,0xAB,0x83);
REM: WAIT until the transponder response is received
WAIT_IRQ(40);
REM: Host software shall confirm that RESP_GENERIC after IRQ reports LF_INFO = 1
REM: Stop LF carrier
CMD_STOP_ALL(1,0x00,0x00,0xFF,0xFF,0xFF,0x00,0x00);
REM: In this example the IMMO is stopped before reading the response to avoid extension of the operation time
REM: due to the transfer of the log messages
REM: Request the data received from the tranponder 48-bits Response
CMD_GET_DEVICE_INFO(0,1);
CMD_SAVE(0);
AUTONOMOUS_MODE(1,2,2000);
评论