

汽车方向盘转向系统,从上世纪50年代到本世纪初,经历了翻天覆地的革新和变化。
最早是纯机械转向,驾驶员打转车轮需要克服前轮带来的强大摩擦力力,使得驾驶机动车十分吃力。上世纪50年代,液压助力(HPS)转向系统应用在汽车上,标志着转向助力的开始。在HPS助力下,驾乘体验有了质的飞越,但是HPS弱点在于成本高、维修难且增加油耗。后来又经几代人的努力,转向系统从液压助力(HPS)到电子液压助力(EHPS),再到如今的纯电动转向助力(electrical power steering,简称EPS),80年代,日本铃木首先在其车型上使用EPS转向助力,标志着电动时代的来临。如今,几乎所有乘用车都采用EPS转向助力。它有以下几个优点:
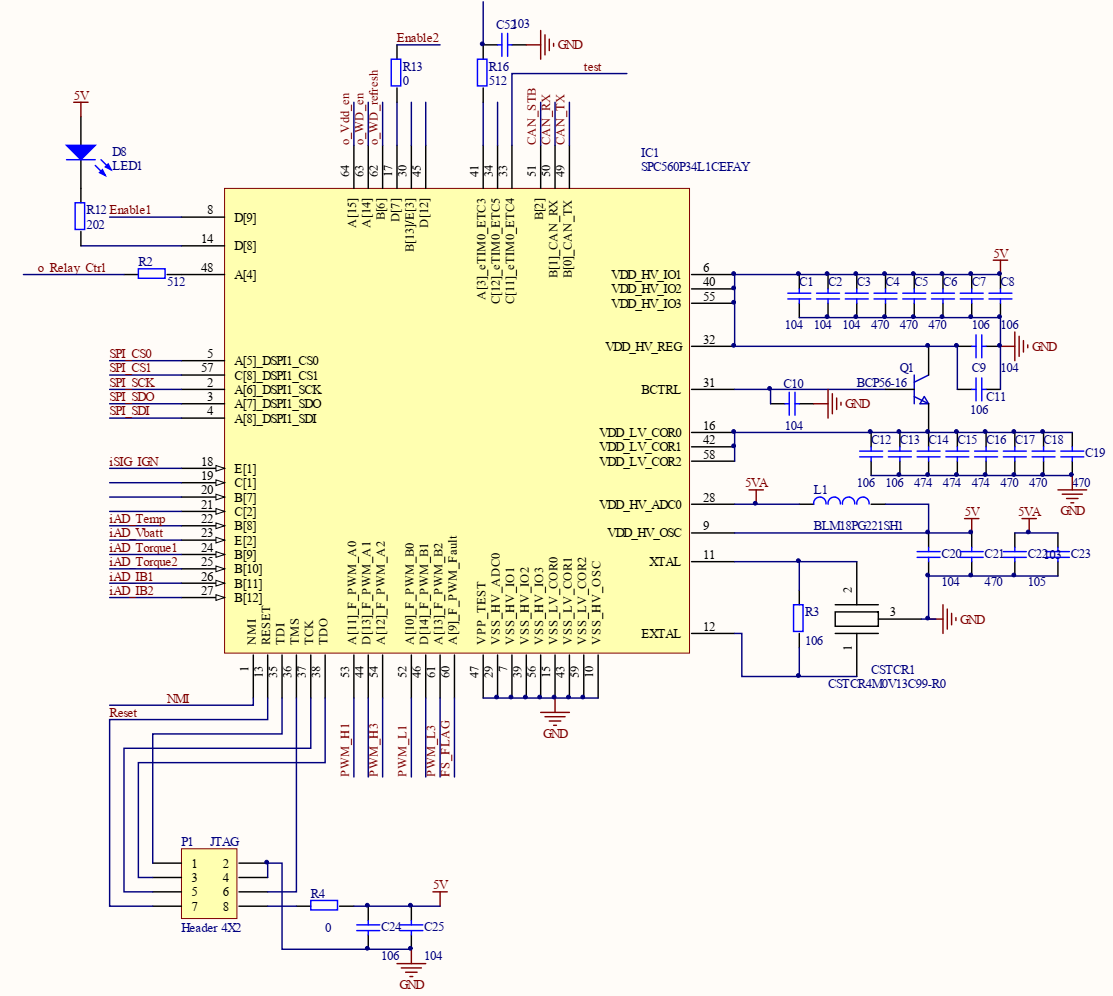
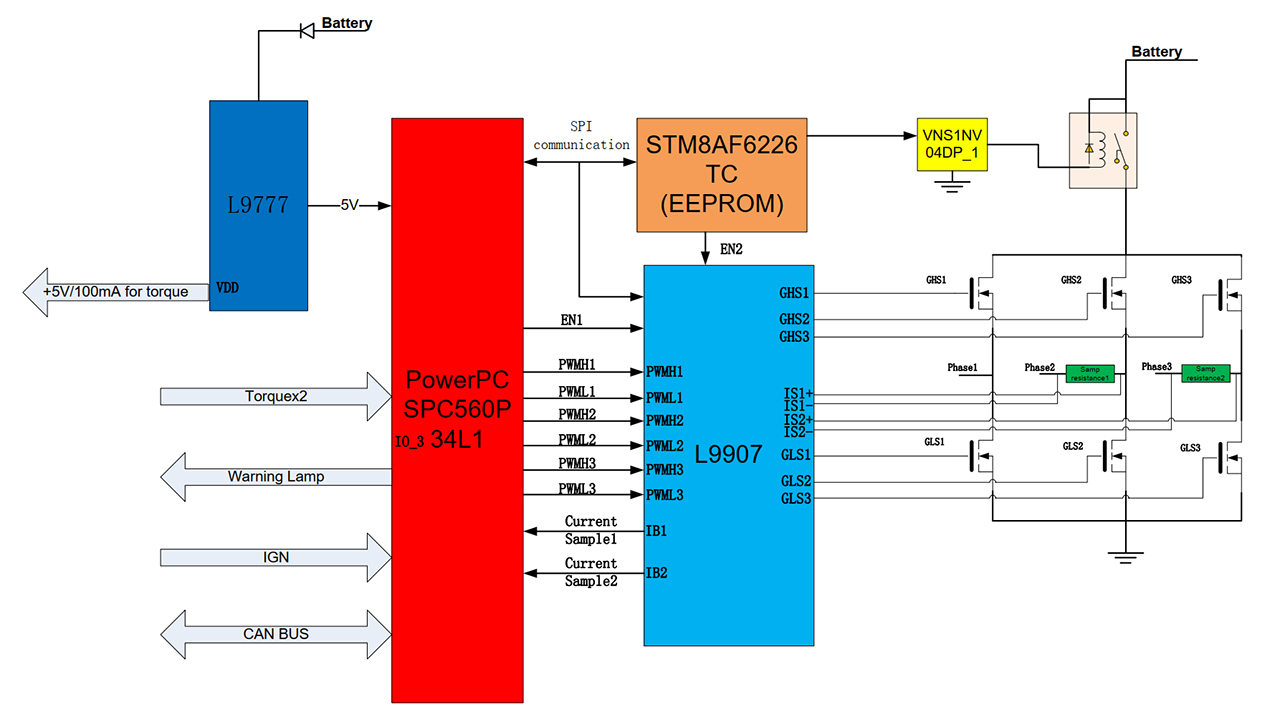
① 主控MCU:本方案采用ST PowerPC SPC560P34L1,是核心算力器件。负责对外部扭力传感器信号、车速、发动机转速信号采集,同时计算驱动策略和PID控制算法。
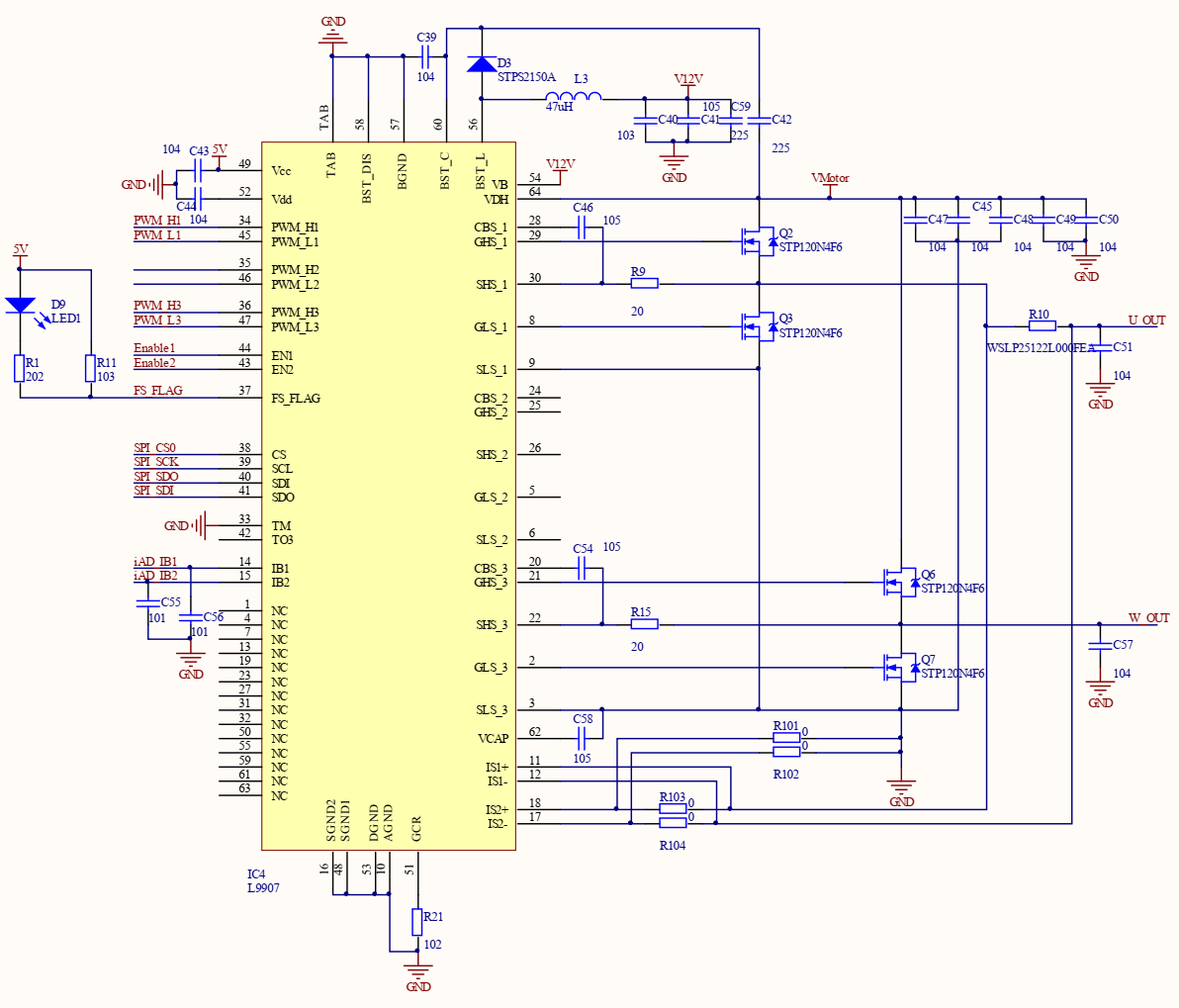
②驱动部分:ST L9907具备三相predriver,H桥(DC电机驱动)或3H桥(BLDC或PMSM电机驱动)构架,同时具备SPI配置、校准和信息反馈,内置运放,可直接抓取来自电机的电流。配合低压MOSFET STP120N4F6,组成一套完整的电机驱动/反馈电路
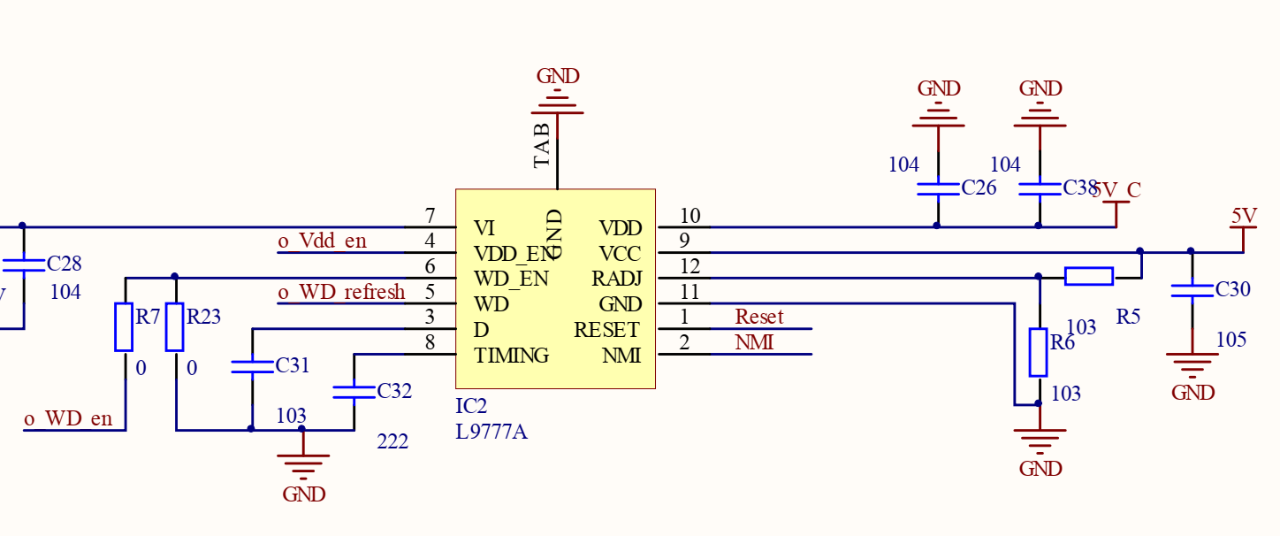
③ 电源系统:ST PM芯片L9777A可提供2路5V DC隔离输出,一路供给内部逻辑电源,另一路供给外部sensor,这样外部尖峰浪涌不易影响到板内元器件,以应对车载复杂的电源条件。
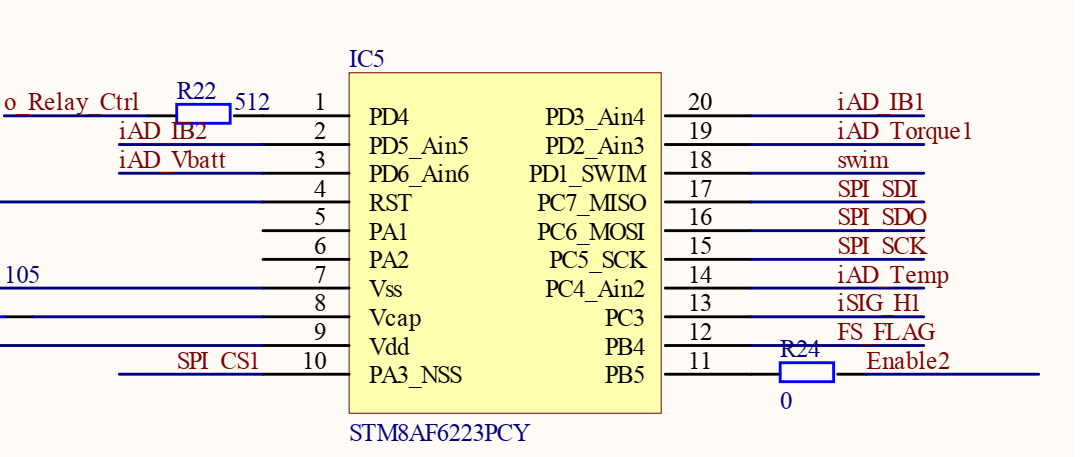
④辅助MCU:增加一颗汽车级8bit MCU STM8AF6223,做整机电源管理和策略监控,一旦遇到故障,可以采取必要的应对措施,以保护车辆和驾乘人员安全。
①电机需要跟随驾驶员转向意图和转向速度,提供相同方向矢量的助力。这需要实时分析扭矩传感器信号并快速计算出PID控制策略
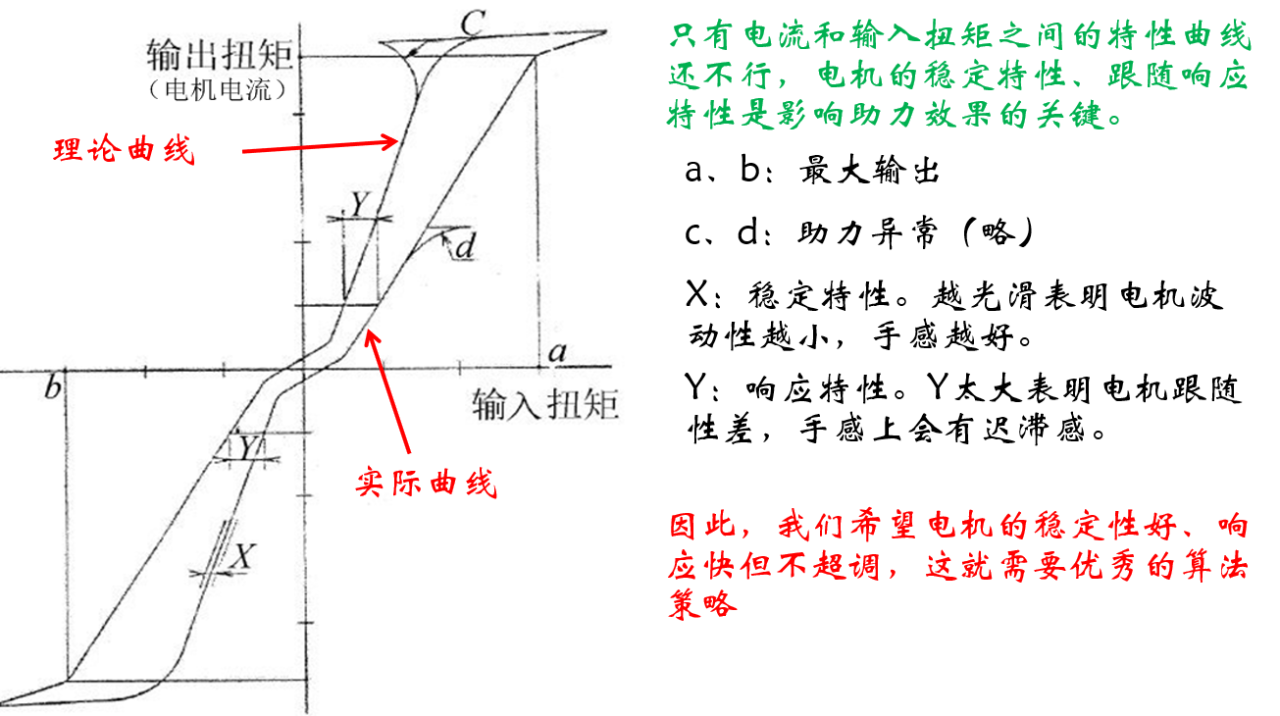
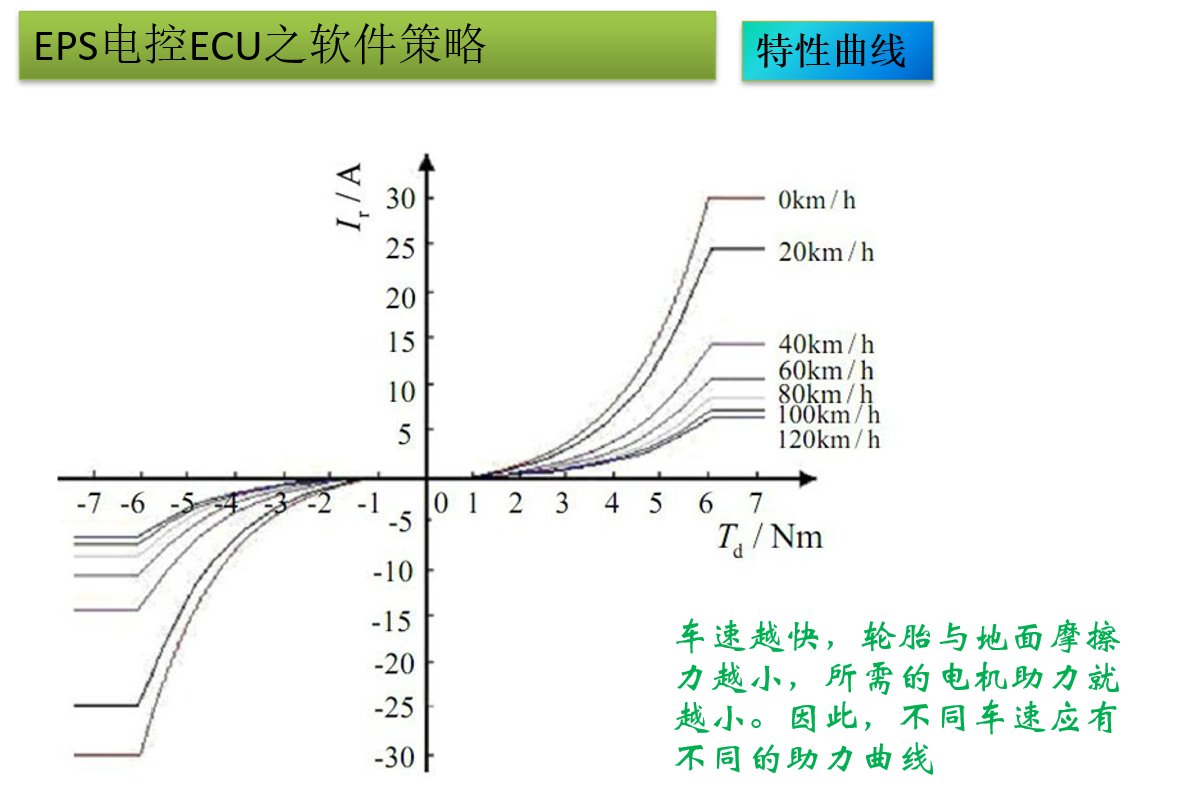
②在不同车速下,电机提供助力的扭矩是不一样的,理论上车速越快,所提供的助力越小。车速超过60~80Km/h,电机甚至需要提供阻尼以应对方向盘过轻、跑偏的状况。这使得整个助力是一个变化的曲线,需要优秀的控制算法
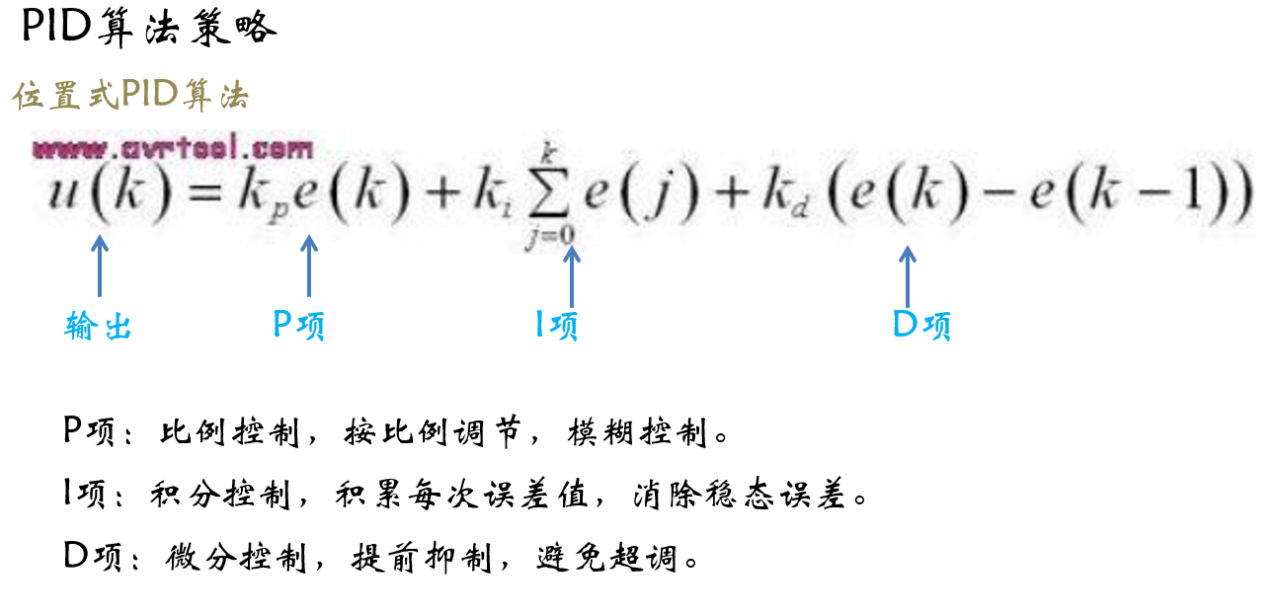
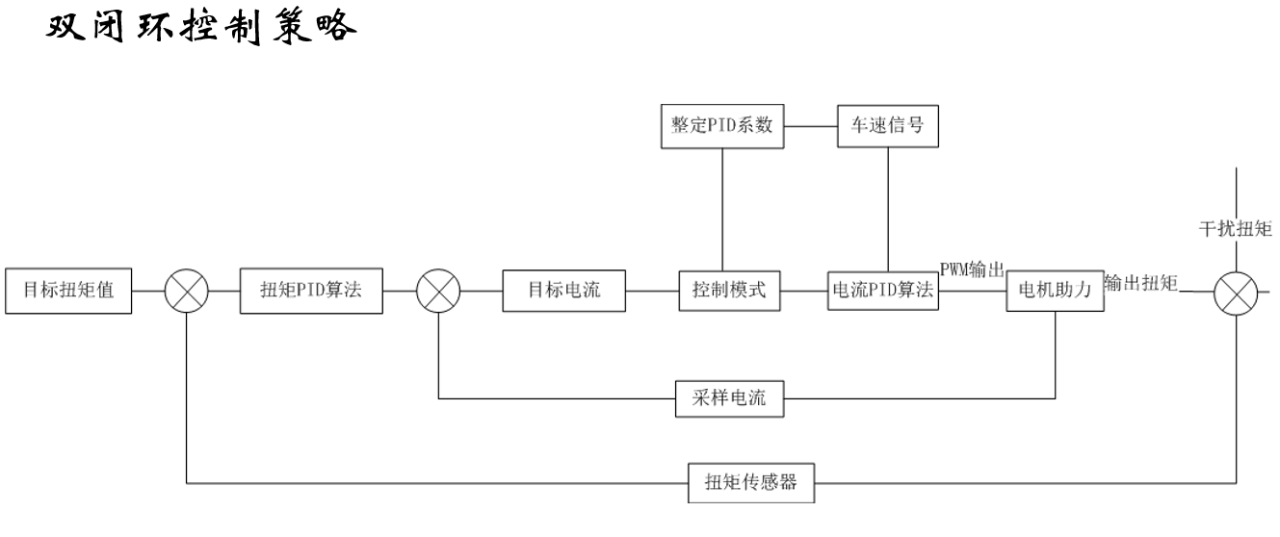
③ 核心PID以及闭环控制算法:通过数学工程PID算法、以及做电流闭环、扭力闭环控制,是电机控制策略的核心关键。优秀的算法,往往可以使电机驱动更平滑、助力迅速跟上但不超调,驾驶体验非常好

最早是纯机械转向,驾驶员打转车轮需要克服前轮带来的强大摩擦力力,使得驾驶机动车十分吃力。上世纪50年代,液压助力(HPS)转向系统应用在汽车上,标志着转向助力的开始。在HPS助力下,驾乘体验有了质的飞越,但是HPS弱点在于成本高、维修难且增加油耗。后来又经几代人的努力,转向系统从液压助力(HPS)到电子液压助力(EHPS),再到如今的纯电动转向助力(electrical power steering,简称EPS),80年代,日本铃木首先在其车型上使用EPS转向助力,标志着电动时代的来临。如今,几乎所有乘用车都采用EPS转向助力。它有以下几个优点:
- 动力来源于电机,转换效率高
- 随车速调节助力大小、操控舒适、稳定
- 实现方向盘主动回正,且可通过CAN总线与车身其它部件组成车联系统,是智能驾驶、泊车的先驱
- 节约油耗3%~5%
- 正常情况下无需更换零部件,终生不维修
- 硬件原理
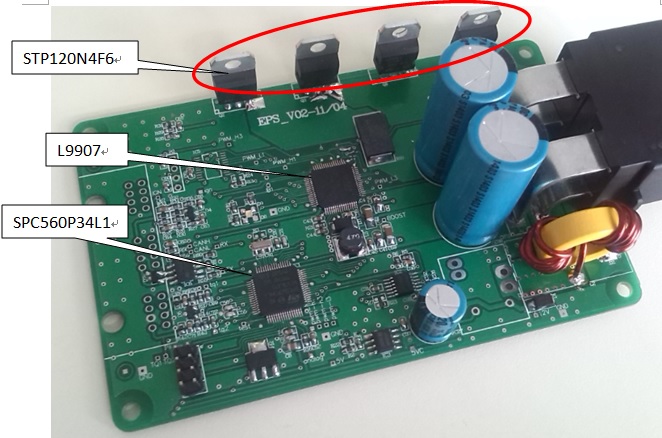
① 主控MCU:本方案采用ST PowerPC SPC560P34L1,是核心算力器件。负责对外部扭力传感器信号、车速、发动机转速信号采集,同时计算驱动策略和PID控制算法。
②驱动部分:ST L9907具备三相predriver,H桥(DC电机驱动)或3H桥(BLDC或PMSM电机驱动)构架,同时具备SPI配置、校准和信息反馈,内置运放,可直接抓取来自电机的电流。配合低压MOSFET STP120N4F6,组成一套完整的电机驱动/反馈电路
③ 电源系统:ST PM芯片L9777A可提供2路5V DC隔离输出,一路供给内部逻辑电源,另一路供给外部sensor,这样外部尖峰浪涌不易影响到板内元器件,以应对车载复杂的电源条件。
④辅助MCU:增加一颗汽车级8bit MCU STM8AF6223,做整机电源管理和策略监控,一旦遇到故障,可以采取必要的应对措施,以保护车辆和驾乘人员安全。
- 软件策略
①电机需要跟随驾驶员转向意图和转向速度,提供相同方向矢量的助力。这需要实时分析扭矩传感器信号并快速计算出PID控制策略
②在不同车速下,电机提供助力的扭矩是不一样的,理论上车速越快,所提供的助力越小。车速超过60~80Km/h,电机甚至需要提供阻尼以应对方向盘过轻、跑偏的状况。这使得整个助力是一个变化的曲线,需要优秀的控制算法
③ 核心PID以及闭环控制算法:通过数学工程PID算法、以及做电流闭环、扭力闭环控制,是电机控制策略的核心关键。优秀的算法,往往可以使电机驱动更平滑、助力迅速跟上但不超调,驾驶体验非常好
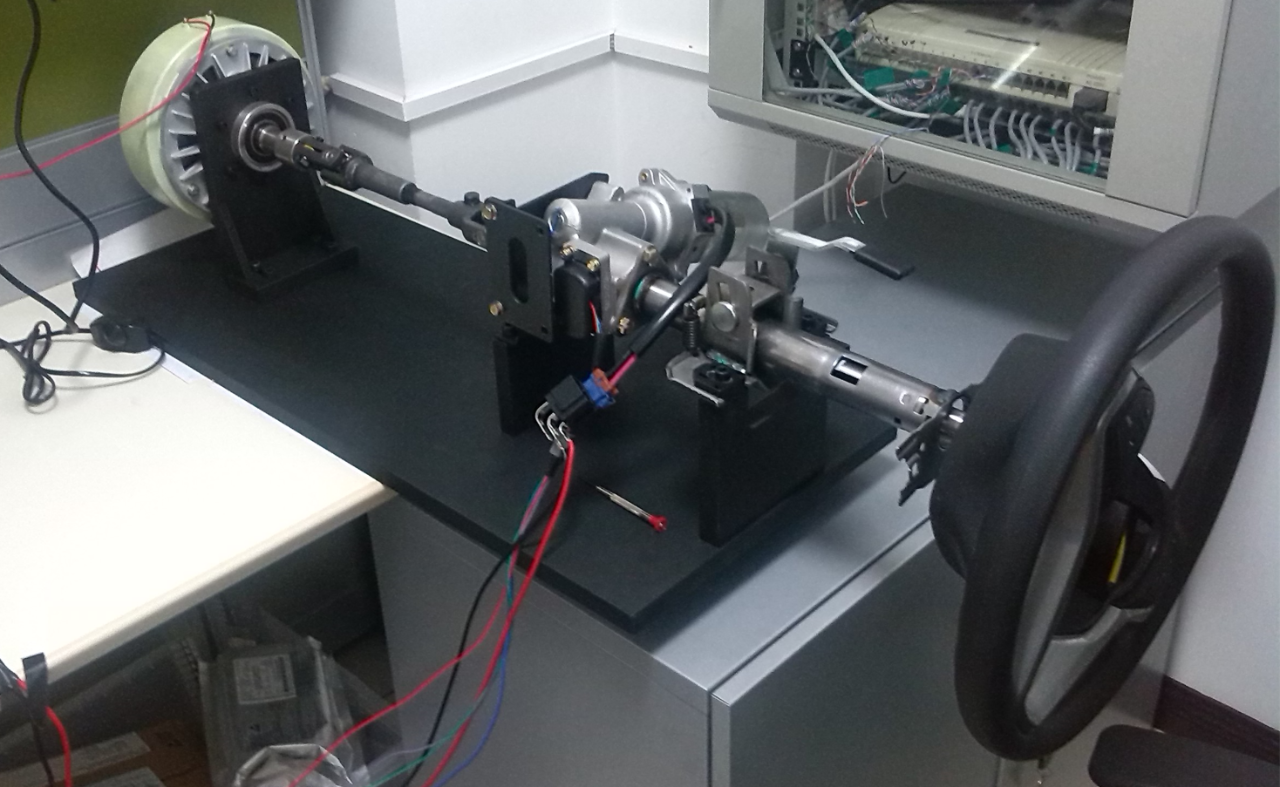
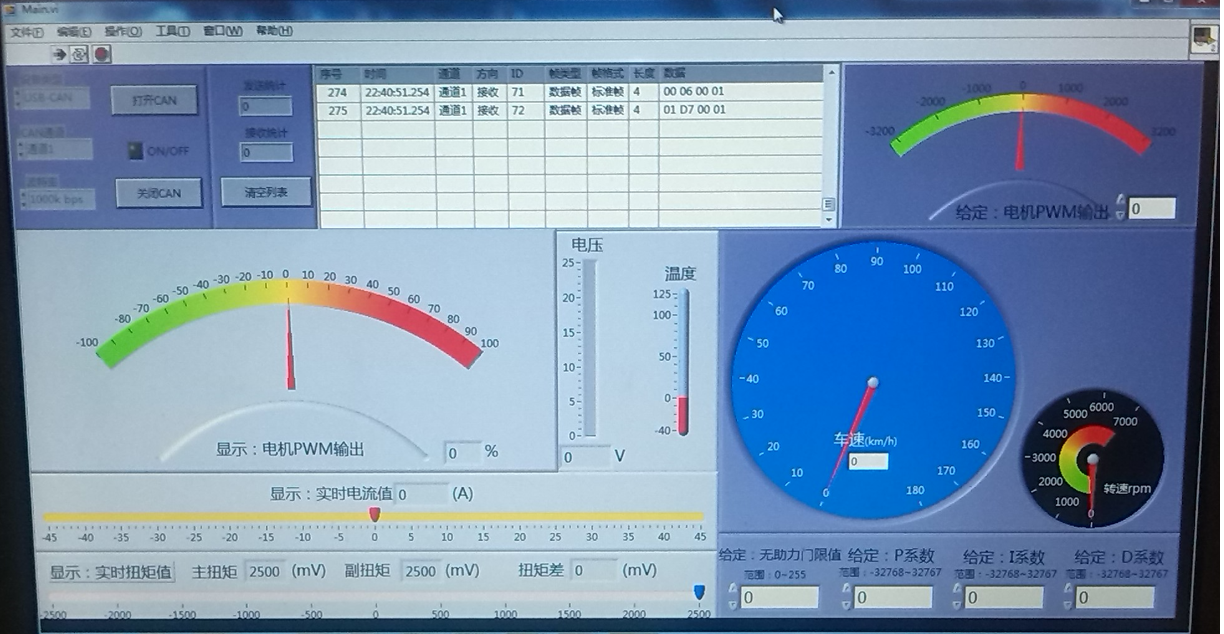
- 试验台架与人机界面
►场景应用图
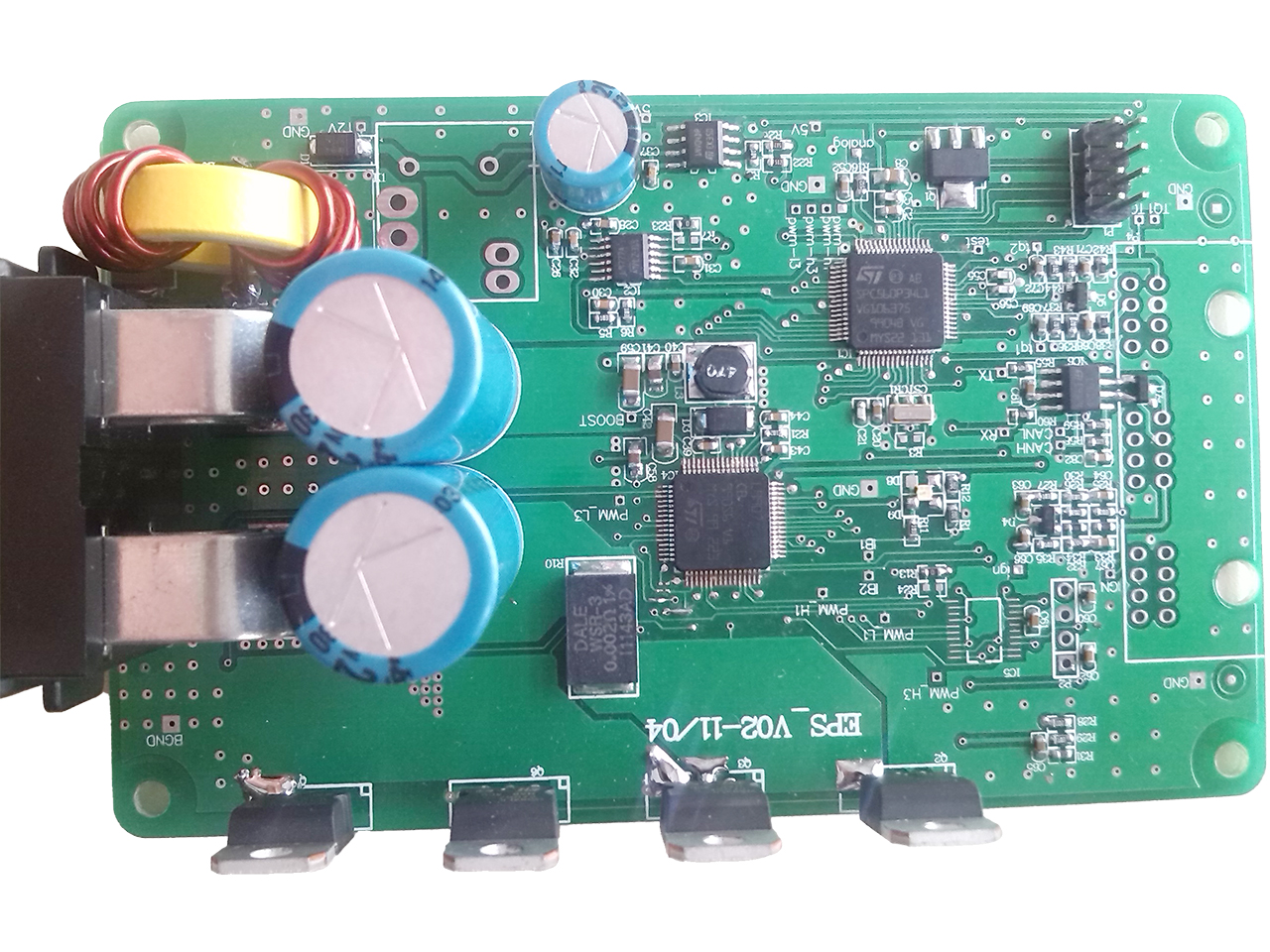
►产品实体图
►展示板照片
►方案方块图
►核心技术优势
拥有比其它32bit MCU更多的对Timer控制策略,实现DC/BLDC/PMSM精确控制 独立控制(助力、主动续流、阻尼、锁定) 双向放大4MHz带宽增益可调 可实现BLDC双桥臂采样 ,速度快,可检测正负电流,倍数可调 运放带offset算法补偿,使采样精度更高 独立5V供外部扭矩传感器。内外电源独立,不受影响
►方案规格
SPC560P34L1: 汽车级PowerPC e200z0h内核,64MHz主频 AEC-Q100 8ch独立/互补通道PWM,16bit精度 拥有比其它32bit MCU更多的对Timer控制策略 L9907: 6~54V适压,可靠性高 6ch PWM Prediver能力:600mA 2ch内置运放:双向放大4MHz带宽增益可调 SPI可配置offset补偿 L9777A: 输入范围5.6~31V / 150mA/100mA双路驱动能力 独立5V跟随