

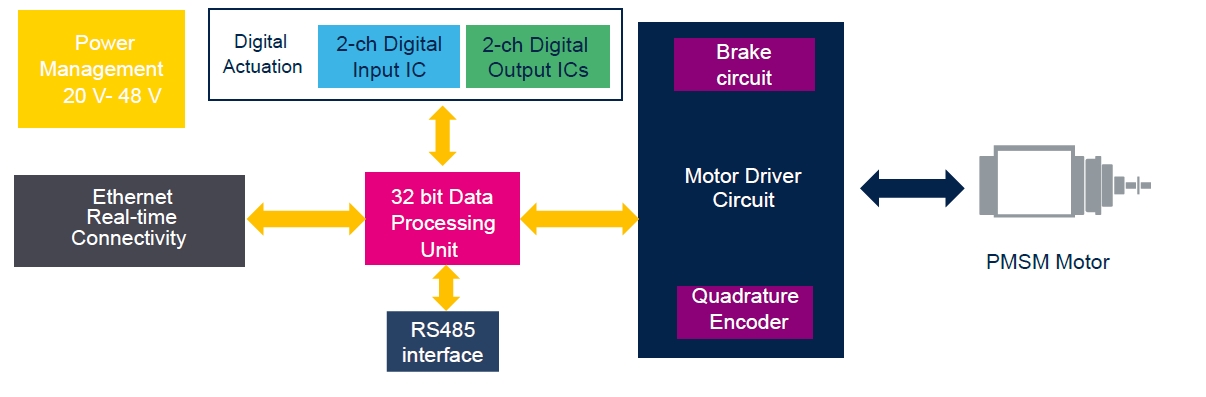
STEVAL-ETH001V1 伺服驱动器专为解决面向多轴位置控制和连接的三相 PMSM 应用而开发。可用于多种工厂自动化应用,例如 工业连接、驱动和运动控制。包含电机控制功率级、数字驱动部分和电源管理部分。
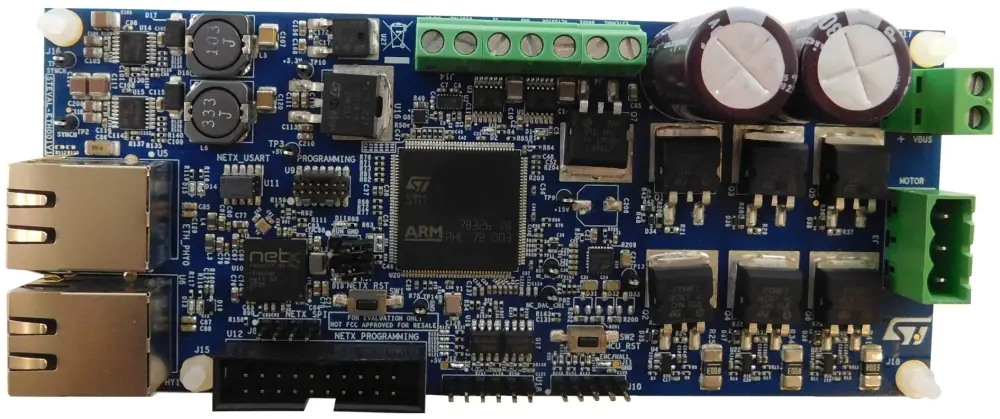
电机控制功率级由STDRIVE101 半桥栅极驱动器和六个 STH270N8F7-2 功率 MOSFET,具有与 NETX90 网络控制器支持的 Ethercat 通信协议实时连接的功能,而数字驱动部分有 CLT03-2Q3(输入)和 IPS160H(输出)的工业 IO 管理。电源管理部分由 L7987、L7805CD2T-TR 和 LD39150DT33-R 器件供电。这些转换器设计用于当输入电压工作在20-48 V范围内时提供3.8 V和15 V参考电压。
STEVAL-ETH001V1 配备两个用于菊花链(daisy chain)连接的 RJ45 连接器和一个用于数字编码器或由 ST3485EI 供电的主机连接的 RS485 接口。
为了获得更好的抗噪性,PCB 采用 6 层堆叠以及电源线和接地线的绝缘走线。 还提供带索引的正交编码器(quadrature encoder)接口。
由 STM32F767ZI 的 32 位数据处理以及使用 NETX90 网络控制器的实时通信(通过四线 SPI 通信与 MCU 连接)透过远程控制驱动 PMSM 电机。
MCU程式基于STM32Cube架构支持,包括: • 应用层 • 具有BSP/CMSIS 和HAL 库的驱动程序层 • 中间件层
更多资讯请注册会员,下载参阅附件使用手册,参考以下
原厂相关连结
STEVAL-ETH001V1 - Servo drive solution for multi-axial position control with Ethernet real-time - STMicroelectronics
STSW-ETHDRV01V1 - Firmware for Servo Drive solution enabling position control through Ethercat Protocol - STMicroelectronics

![]()
电机控制功率级由STDRIVE101 半桥栅极驱动器和六个 STH270N8F7-2 功率 MOSFET,具有与 NETX90 网络控制器支持的 Ethercat 通信协议实时连接的功能,而数字驱动部分有 CLT03-2Q3(输入)和 IPS160H(输出)的工业 IO 管理。电源管理部分由 L7987、L7805CD2T-TR 和 LD39150DT33-R 器件供电。这些转换器设计用于当输入电压工作在20-48 V范围内时提供3.8 V和15 V参考电压。
STEVAL-ETH001V1 配备两个用于菊花链(daisy chain)连接的 RJ45 连接器和一个用于数字编码器或由 ST3485EI 供电的主机连接的 RS485 接口。
为了获得更好的抗噪性,PCB 采用 6 层堆叠以及电源线和接地线的绝缘走线。 还提供带索引的正交编码器(quadrature encoder)接口。
由 STM32F767ZI 的 32 位数据处理以及使用 NETX90 网络控制器的实时通信(通过四线 SPI 通信与 MCU 连接)透过远程控制驱动 PMSM 电机。
MCU程式基于STM32Cube架构支持,包括: • 应用层 • 具有BSP/CMSIS 和HAL 库的驱动程序层 • 中间件层
STEVAL-ETH01V1伺服驱动解决方案的STSW-ETHDRV001V1固件包实现了位置控制算法,并在STM32F767ZI微控制器上运行即时通信。它可以同时管理连接、伺服驱动器驱动和数位输入/输出界面。
连接包括与从节点的 EtherCAT 协定栈 (V. 5.0.8) 的即时通信,以及用于将硬体与支援 BiSS、EnDat 和 SSi 协定的 PC 或数位编码器连接的 RS485 通信。
伺服驱动器驱动装置使用X-CUBE-MCSDK电机控制库实现位置控制算法,通过EtherCAT通信遥控器控制PMSM电机转子位置。
数字执行界面管理由一组例程支援,能够根据从CLT160-03Q2数位输入接收的信息和通过RS3连接从PC接收的命令来管理IPS485H数位输出状态。
更多资讯请注册会员,下载参阅附件使用手册,参考以下
原厂相关连结
STEVAL-ETH001V1 - Servo drive solution for multi-axial position control with Ethernet real-time - STMicroelectronics
STSW-ETHDRV01V1 - Firmware for Servo Drive solution enabling position control through Ethercat Protocol - STMicroelectronics
►场景应用图
意法半导体
►展示板照片
意法半导体
►方案方块图
意法半导体
►核心技术优势
电路板设计抗杂讯能力强 电机控制 48 V 设计,密度集成电路 700W高功率输出 确保与 Master Ethercat 的兼容性(使用Bechkoff 的 Twincat 软件工具代替硬件解决方案) 支援的 EtherCAT 从站协定 (V.5.0.8) 程式兼容STM32Cube框架
►方案规格
过 Ethercat 协议进行实时通信 基于 STDRIVE101 栅极驱动器的三相电机驱动逆变器和STH270N8F7-2功率MOSFET STM32F767ZI 微控制器 Arm®32 位 Cortex®-M7 NETX90 网络控制器 主电源电压高达48V最大。可过压稳至60 V 最大功耗 700 W 电机制动耗能电路 工业负载的数位驱动部分 用于数位编码器和主机接口的 RS485 接口 板载 DC-DC 转换器和线性稳压器