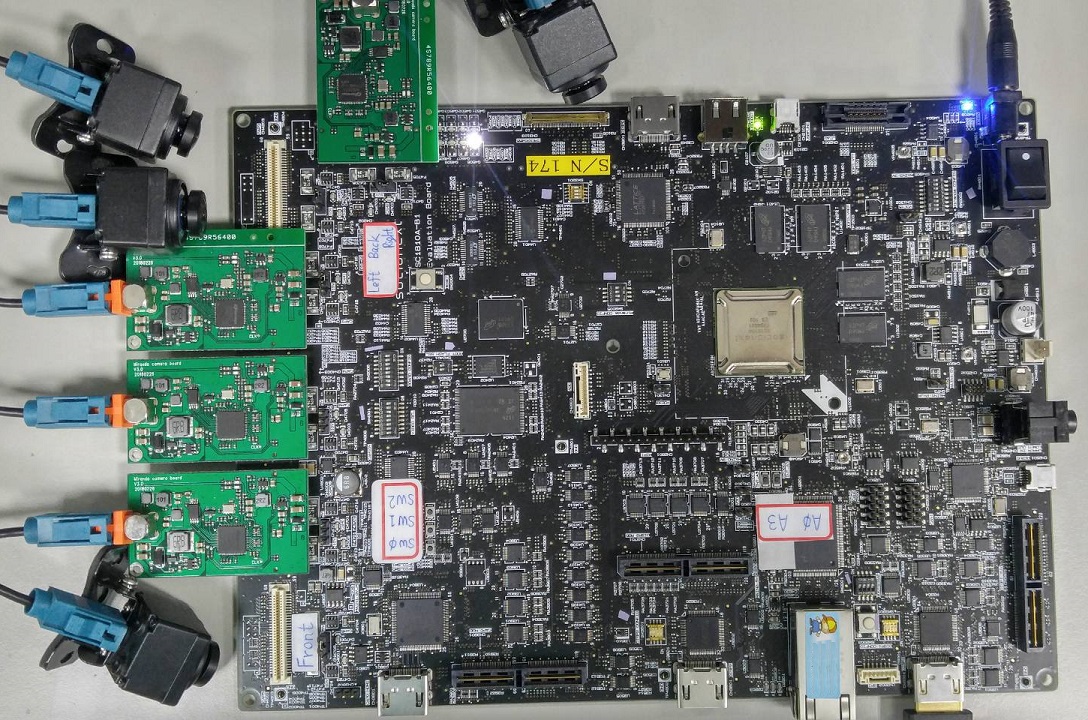
此方案收集4个车载镜头(影像感测器)的影像,运行先进驾驶辅助系统(ADAS)必需的影像识别算法,可即时识别汽车周围的行人,不仅仅只侦测汽车前方的行人做警示,而是可以拉大范围,侦测位于汽车周围360度的行人,并进行360度视野持续追踪已侦测到的行人,提供车外变化的行驶环境给驾驶,辅助驾驶避免视线死角造
为提供您更多优质的内容,本网站使用 cookies 分析技术。若继续阅览本网站内容,即表示您同意我们使用 cookies,若不同意请关闭浏览器的 cookie 功能,关于更多资讯请阅读 Cookie 政策平台服务条款