

一、滑窗算法介绍
滑动窗口算法的核心思想如下:
将透视变换后的二值化图像分为左右两部分,计算各部分纵向累加的像素之和,排序后得到左右累加值的峰值 —— 作为左右滑动窗口横向起始位置;接着统计出在当前窗口中车道线像素的分布 —— 由此确定出当前窗口中车道的中心;以这个中心为下一个窗口的下边线中心,不断迭代这个过程,滑动窗口将会不断向上移动,最终将确定完整个车道线的点。如图 1.1 所示。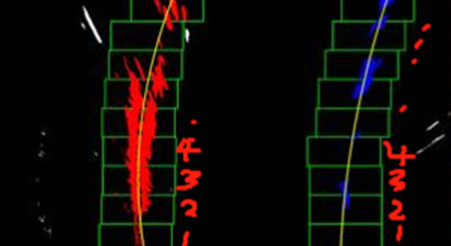
图 1.1 滑动窗口算法原理图
滑动窗口算法相对其他算法而言,其优势还是很明显的:尤其对于曲线形车道线的鲁棒性非常好,同时经过拟合后可以直接计算出曲率半径。
综上所述,本次采用滑动窗口算法进行车道线的定位,并对车辆的偏离情况进行预警处理。
二、滑动窗口算法流程图
LDW 滑动窗口算法主要应用模块内容包括图像反畸变处理模块、图像预处理模块、透视变换与逆透视变换模块、滑动窗口算法模块、曲线拟合处理模块、Kalman 滤波预测与修正模块以及辅助处理模块。滑动窗口算法流程图如图 2.1所示。
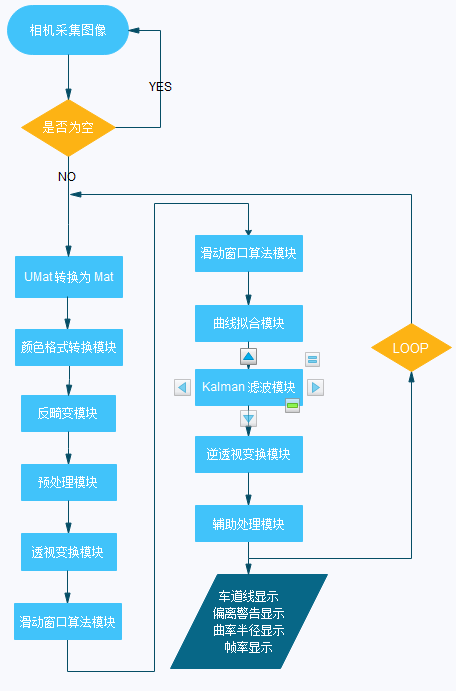
图 2.1 滑动窗口算法流程图
三、LDW 滑窗算法总结
LDW 应用滑动窗口算法能够更好地筛选、识别出直线型与曲线型车道线,并借助二次曲线拟合能够很好地计算出车道线曲率半径,基本实现了国标GBT 26773-2011 对 LDW 的检测要求。本方案在 PC仿真状态下帧率基本能够达到 25 FPS 左右。
鉴于反畸变模块占用大量资源(前后帧的变化达20 FPS),影响 Kalman 滤波更新速度偏慢,此方案预计在 EVB 上的运行情况会低于仿真状态的帧率。滑窗算法的 LDW 执行效果如图 3.1 所示。如对方案有更多需求,敬请联系世平集团 ATU 部门,atu.cn@wpi-group.com。
图 3.1 LDW 滑窗算法执行效果图
评论