

各式各样的传感器, 在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的数据, 通常位于车辆的前后保险杠、后视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时, 会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预也很常见。
汽车高级辅助驾驶系统通常包括导航与实时交通系统TMC,电子警察系统ISA (Intelligent speed adaptation或intelligent speed advice)、车联网(Vehicular communication systems)、自适应巡航ACC(Adaptivecruise control)、车道偏移报警系统 LDWS( Lane departure warning system)、车道保持系统(Lane keep assistance),碰撞避免或预碰撞系统(Collision avoidance system或Precrash system)、夜视系统(Night Vision system)、自适应灯光控制(Adaptive light control)、行人保护系统(Pedestrian protection system)、自动泊车系统(Automatic parking)、交通标志识别(Traffic sign recognition)、盲点探测( Blind spot detection) ,驾驶员疲劳探测(Driver drowsiness detection)、下坡控制系统(Hill descent control)和电动汽车报警(Electric vehicle warning sounds)系统。
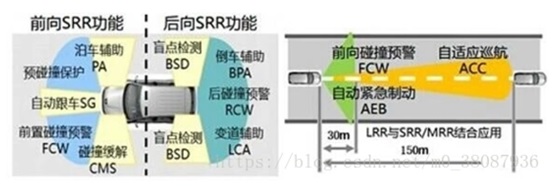
在 ADAS 系统中,毫米波雷达被广泛应用于自适应巡航(ACC)、前向碰撞预警(FCW)、自动紧急制动(AEB)、盲点侦测(BSD)、辅助停车(PA)等等,
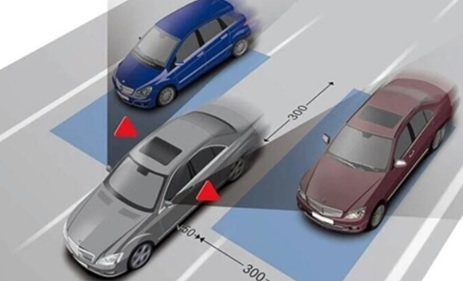
自适应巡航(ACC)
自适应巡航(Adaptive Cruise Control,ACC),是一种可以依据设定的车速或者距离跟随前方车辆行驶,或根据前车速度主动控制本车行驶速度,最终将车辆与前车保持在安全距离的驾驶辅助功能,该功能最大的优点是可以有效的解放驾驶者的双脚,提高驾驶的舒适性。
ACC的实现原理:在车辆行驶过程中,安装在车辆前部的毫米波雷达传感器持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC系统可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。ACC系统在控制车辆制动时,通常会将制动减速限制在不影响舒适度的程度,当需要更大的减速时,ACC系统会发出声、光预警信号通知驾驶者主动采取制动操作。
自动紧急制动(AEB)
自动紧急制动(Autonomous Emergency Braking,AEB),是一种汽车主动安全辅助功能。AEB系统利用毫米波雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动,从而确保驾驶安全。
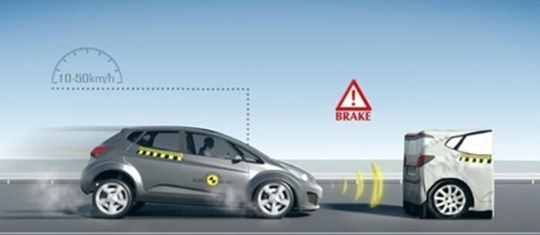
据研究表明,90%的交通事故是由于驾驶者的注意力不集中而引起的,AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60km/h)或郊区道路行驶的情况下,效果都显著。所以,欧洲新车安全评鉴协会(Euro NCAP)在2014年率先将AEB系统纳入整体安全评级中,而我国也在2018年将AEB加入了NCAP评分体系。
前方防撞预警功能(FCW)
前方防撞预警(Forward Collision Warning,FCW),通过毫米波雷达和前置摄像头不断监测前方的车辆,判断本车与前车之间的距离、方位及相对速度,探测到前方潜在的碰撞危险,当驾驶员没有采取制动措施时,仪表会显示报警信息并伴随声音报警,警告驾驶员务必采取应对措施。当判断到事故即将发生时,系统会让刹车自动介入工作,从而避免事故发生或降低事故可能造成的风险。

AEB通过传感器探测前方的车辆、行人等障碍物,如果发现距离过近且存在碰撞风险时,进行自动制动。FCW则可以理解为进行自动制动之前的预警功能。其实,FCW和AEB系统是相辅相成的关系,目的都是在行车时避免或减少碰撞事故的发生。
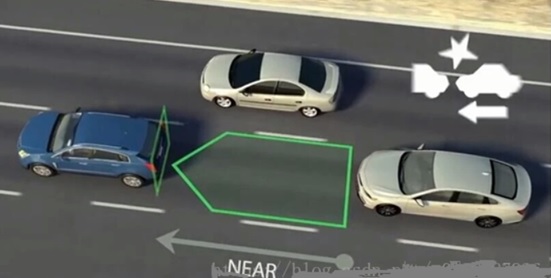
变道辅助(LCA)
变道辅助(lane change assist,LCA),是通过毫米波雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测,获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断,最终以声、光等方式提醒驾驶员,让驾驶员掌握最佳变道时机,防止变道引发的交通事故,同时对后方碰撞也有比较好的预防作用。
变道辅助系统包括“盲点检测(BSD)”、“变道预警(LCA)”、“后碰预警(RCW)”3个功能。可以有效地防止变道、转弯、后方追尾等交通事故的发生,极大提升汽车变道操作的安全性能。
其中,BSD根据其判断的移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险。LCA检测目标车辆在相邻的区域以较大的相对速度靠近本车,在两车时距小于一定范围内时,通过声、光等方式提醒驾驶员。RCW检测到同一车道后方有快速接近的移动物体,并有碰撞风险时,及时通过声、光等方式,预警驾驶员系好安全带等方式减小碰撞带来的伤害。
多种传感器融合
其实在驾驶辅助功能实现的过程中,毫米波雷达起到了最核心的物体探测、测距和测速的作用,但是整个过程还需要其它传感器的辅助,比如激光雷达、摄像头、超声波雷达、惯性传感器等。随着越来越多汽车厂商开始将不同的传感器整合到汽车ADAS中,业界普遍认为“传感器融合(sensor fusion)”是高度自动化驾驶安全性的关键。
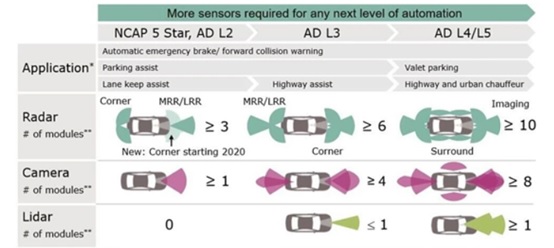
在环境感知中,每一种传感器都有独特的优势和弱点。例如,毫米波雷达不受天气影响可全天候全天时工作,但分辨率不高,不能区分人和物;而摄像头有更高的分辨率,能够感知颜色,但受光的影响较大;激光雷达则能够提供三维尺度感知信息,对环境的重构能力强,但受天气影响大。传感器各有优劣,难以互相替代,未来要实现自动驾驶,是一定需要多种传感器相互配合共同构成汽车的感知系统。随着自动驾驶从L2级朝L5级自动驾驶发展,集成在汽车上传感器数量和种类不断增加,只有这样才能够保证信息获取充分且有冗余,才能满足所需的安全标准。
对于汽车应用来说,不仅要考虑毫米波雷达前端的集成,与其它传感器的融合,还要考量与主处理器的“合作”,到底是集成还是分立,还是需灵活折中?从产品趋势来看,一种是传感器本身的融合或高度集成,如将毫米波雷达前端与摄像头等其它传感器集成;另一种是单芯片系统方案,即“多传感器+主处理器+数字信号处理器”,未来的争夺战也将围绕这两方面展开,当然性价比是前提。在市场需求层面,既需要有雷达前端集成芯片,亦需要单芯片系统方案,以满足客户的差异化需求。
评论