

一、前碰撞预警系统背景概述
2017年3月7日,交通运输部组织制定了交通运输行业标准《营运客车安全技术条件》,并于2017年4月1日起正式实施,要求9米以上的营运客车要求必须具备车道偏离预警和前方碰撞预警系统(FCW),并给出了13个月的过渡期。交通部此项强制要求是国内首个强制安装ADAS系统的案例,由此可见,FCW是ADAS的必备基础功能。
相关统计数据表明,由于驾驶员的主观因素导致的交通事故占比最高,若在交通事故发生前的1.5s给驾驶员发出预警,可避免90%的碰撞事故,大大减少交通事故的伤害。而汽车防碰撞安全控制系统就是通过各种传感器,比如摄像头、雷达等,实时检测车辆周围的物体,并检测目标车辆距离本车的距离。当安全距离小于阈值时,则发出警报提示驾驶员,有效降低了交通事故的发生。
其实,对汽车防碰撞系统的研究源远流长,早在20世纪70年代,日本就开始进行了汽车碰撞系统的研究,1999年,本田、丰田、日产三大车厂各自开始开发自己的前车碰撞预警系统,2003年在美版雅阁中本田首次安装了自己的碰撞缓解制动系统(CMBS),可以看做是现在FCW(Forward Collision Warning)系统的前身。CMBS系统的工作原理是:当毫米波雷达探测到前方可能有碰撞危险时,便以警告的方式提醒驾驶员,如果继续接近,当系统判断将要追尾时,则会采取自动制动措施。而日本另一大汽车厂商丰田的预碰撞安全系统最早是在2003年安装在雷克萨斯LX和RX车系上,同样也是采取了毫米波雷达作为传感器。欧美对此的研究也不落后,作为全球安全领域的领军者——沃尔沃在2006年的S80上首次安装了碰撞预警系统,通过毫米波雷达来检测车距,发现危险时会提示驾驶员立即制动,同时会推动制动片接近制动盘,以便为驾驶员制动提供最快的反应速度,2007年系统升级后,沃尔沃便增加了自动制动的功能。现在,FCW功能已经成为ADAS系统常见的标准配置。
二、前碰撞预警系统FCW实现原理详解
首先,通过分析传感器获取的前方道路信息对前方车辆进行识别和跟踪,如果有车辆被识别出来,则对前方车距进行测量。同时利用车速估计,根据安全车距预警模型判断追尾可能,一旦存在追尾危险,便根据预警规则及时给予驾驶人主动预警。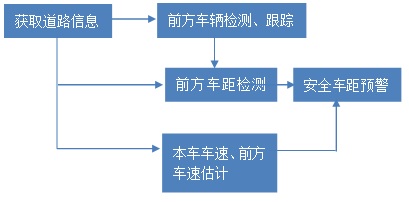
FCW系统实现原理
具体来说,我们可以将以上过程分为三个部分。
1)前方车辆识别
2)前方车距检测
3)建立安全车距预警模型
当车速大于30km/h时,FCW功能处于激活状态。
最早可以在预计发生追尾碰撞前2.7秒时,车辆图标变红闪烁,并发出紧促的滴滴声音告警。
车距监控与告警HMW
当车速大于30km/h,且车距《=2.5s时(以秒为单位),车距监控会显示前方车辆的车距。当车距从远处靠近到1.0s时(或预设危险阈值)时,发出“叮-”一声告警。
FCW功能处于激活状态。
最早可以在预计发生追尾碰撞前2.7秒时,车辆图标变红闪烁,并发出紧促的滴滴声音告警。
1、前方车辆识别
车辆识别是前提,可以采用的传感器有单目视觉、立体视觉、毫米波雷达以及多传感器融合。目前,基于单目视觉灰度图像进行车辆识别的研究最为广泛,所涉及的算法也较多,著名ADAS公司Mobileye就是使用单目视觉方案来解决。车辆检测一般都是依靠车辆特征信息,如车辆形状、车高与车宽的比例等作为检测车辆边缘的约束条件,对图像进行边缘增强处理后获得一些包含车辆信息的水平和垂直边缘,从而对车辆进行检测。
使用单目摄像头的算法简单、计算的实时性强,但单目视觉方案容易受到光照、阴影等外界环境因素的影响,使其可靠性下降。立体视觉是近年来兴起的另一路径,直接模拟了人类视觉处理景物的方式,通过从多个视点观察同一景物,以获取在不同视角下的感知图像,现有的立体视觉技术还不太成熟,研究热度远不如单目视觉。另外,为了突破单一传感器的局限性,采用多传感器信息融合技术也是当前研究的主流,常见的有视觉与激光传感器的融合以及视觉与毫米波雷达传感器的融合,多传感器的缺点除了成本高昂外,计算较为复杂造成实时性差也是当前面临的主要困难。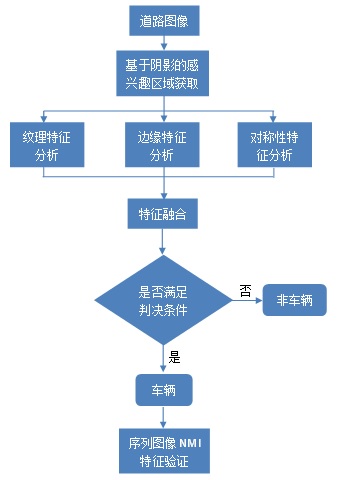
图2 车辆识别算法流程图
2、前方车距检测
车距测量是FCW系统的重要组成部分,超声波、毫米波、激光雷达、视觉摄像头都可以实现。超声波测距原理简单、成本最低,但其测距精准性受室外温度影响大,衰减快,因此目前只适合短距离测距,主要用在倒车雷达上。实际应用中,常用的是毫米波雷达和视觉方案。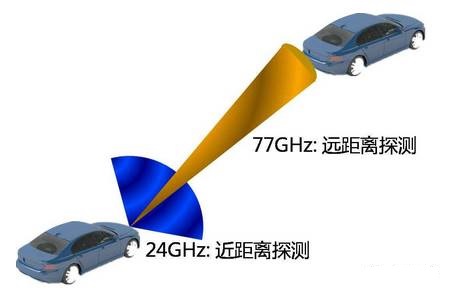
图3 毫米波雷达测距示意图
通对于毫米波雷达,视觉测距所需的算法比较复杂,通常有单目视觉和双目视觉两种。单目视觉采用摄像机的焦距和事先确定的参数来估算车距,而双目视觉测距是利用视差的原理,通过对两幅图像进行计算机分析和处理,确定物体的三维坐标,可采用公垂线 中点法计算出距离。鉴于视觉技术采集的信息量丰富,以及目前图像处理技术的巨大进步和计算能力已经能够保证图像处理实时性要求,价格低廉的视觉方案成为最理想的选择。如下图所示,对前方车辆的跟踪和测距都是动态进行的,如果前方车辆突然变道超车,FCW必须马上将跟踪车辆切换的新的目标上。 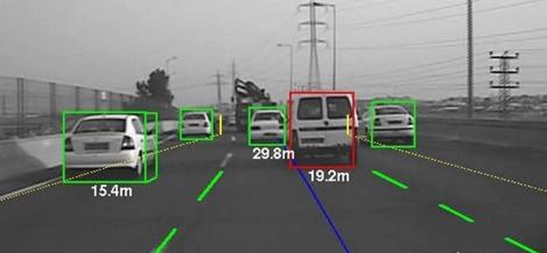
图4 实际应用中的FCW系统
3、 安全车距预警模型
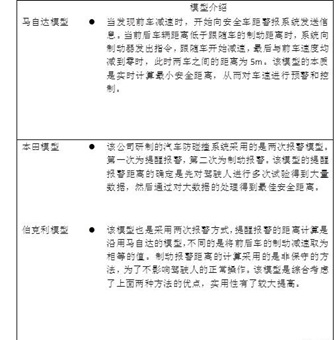
在模型设计上,马自达模型、本田模型以及伯克利模型是比较经典的安全车距模型,后续的很多模型都是在其基础上进行改良。
表1 经典安全车距预警模型
如何分辩汽车自动防撞系统质量
目前市场上各类汽车辅助刹车系统(汽车自动防撞系统),名目繁多,鱼龙混杂,外行看来都能实现预警、刹车,但实际产品品质、功能、安全方面却有天壤之别。现以表格的形式把优质与一般的汽车自动防撞系统分别对应的参数、性能指标、设备等列出来供消费者参考。
|
品质 |
优良 |
一般 |
|
配置 |
参数 |
参数 |
|
前测距雷达 |
矩阵激光、79G毫米波各自独立使用或组合使用 |
普通激光、远红外、76G毫米波 |
(稳定性差)
障碍物目标
1~20个
1个
障碍物距离
显示
无
前刹车强度
1~100(强度可调)
1~10(舒适性差)
后刹车强度
1~100(强度可调)
1~10(舒适性差)
执行机构
齿轮减速(自动回位、响应速度快)
蜗轮蜗杆(刹车易抱死、响应速度慢)
车速信号
车速、轮速、智能ABS可兼容
霍尔、车速、轮速(安装复杂、信号不稳定)
车速显示
有(与原车速度一致)
无(易造成误刹车)
行驶模式
预警、高、低速自动切换
不能自动切换
倒车限速
有
无
刹车信号
有
无
线束插件
专业汽车级
普通
回位装置
有(自动回位)
无(刹车易抱死)
ECU控制器
专业汽车级(稳定)
普通(不稳定)
故障显示
有
无
故障保护
自动关闭
无
开关记忆
有
无
系统常开
有(通电自动开启)
无(通电手动开启)
雷达校准
智能显示
无
刹车行程
自动校准
手动
自动检测
有
无
ECU算法
专业精准
非专业
专业检测设备
有(出厂检验)
无
上位机软件
有(ECU自检功能)
无
结语:
交通运输部发出关于贯彻落实交通运输行业标准《营运客车安全技术条件》(JT/T 1094-2016)的通知 [2] 。《营运客车安 全技术条件》下的技术要求第4.1.5条明确规定:9M以上的营运客车要求加装车道偏离预警系统(LDWS)以及符合标准的前碰撞预警(FCW)功能,并 在第5条标准实施的过渡期要求里明确规定了13个月的过渡期限。而LDWS系统和FCW系统的核心就是防撞雷达,而市场上能够达到防撞性能指标的是毫米波 雷达。
评论