

概述
绝对准确度的议题一直都是机械手臂使用者在评估期会提出的疑问,同时各家机械手臂厂牌(制造商)针对精度的定义有所不同,
在各家制造商通常于规格表基本提及重复性精度 repeatability,是决定性能优劣最常见的规格之一。
然而,因自动化领域应用产业较为广泛,且因应科技产品类型日新月异设计取向短、小、轻、薄,使得机械手臂对于应用精度要求愈来愈高,
为了面对市场需求对于机械手臂准确度规格的需求,例如 : 更快速度的要求 CycleTime的提升、更佳稳定的可靠度要求、抑制震动的能力等
会是影响著机械手臂发展及众多厂牌们的竞争议题。
从空间的概念上理想机器人与实际机器人之间的存在着"误差" Error factor,我们将其归类以下几点:
- 机器人设计构造
- 机器人组装出厂机械误差
- 末端工具的设计安装误差
- 机器人被安装之方法误差
区域校正功能
在此,EPSON Robot 对于绝对准确度的需求提供校准功能将校正这些误差,使机器人的实际位置及轨迹与指定座标及轨迹相同。
利用绝对准确度校准提高准确度,可期待产生下列效益。
- 有效缩短与降低需教导点的耗时与数量
- 提升手臂动作高精度的组装需求
- 缩短换线时的准备调基时间
功能概述
区域失真校正功能在图形中的参考点,与实际教导的点之间存在差异时,校正点的位置。
校正在所选参考点包围的区域内有效。使用区域失真校正功能,可以省略参考点包含区域中点的教导。
请将参考点在绘图上的位置储存为点资料。点编号须为连续。举例而言,选择4 点的参考点时,请在点档案内准备4 个连续的区域。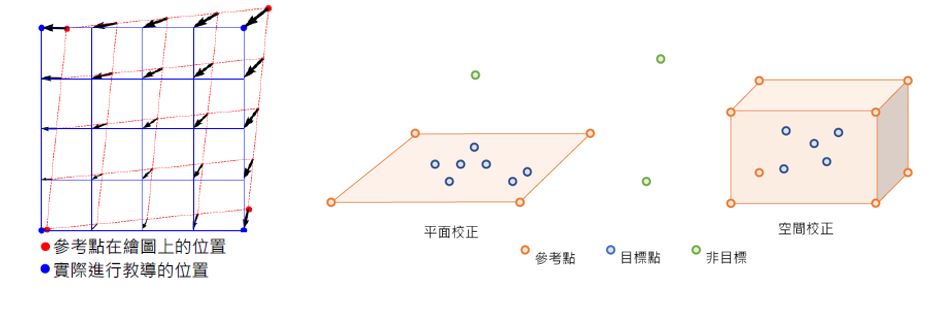
SPEL+命令列表
区域失真校正功能的SPEL+命令列表。
AreaCorrectionSet 设定与显示补偿区域
AreaCorrectionDef 回传补偿区域的设定值
AreaCorrectionClr 补偿区域
AreaCorrection 函数 回传以补偿区域进行补偿的点
AreaCorrectionInv 函数 复原完成补偿的点
AreaCorrectionOffset 函数 回传从完成补偿的点进行相对移动的点
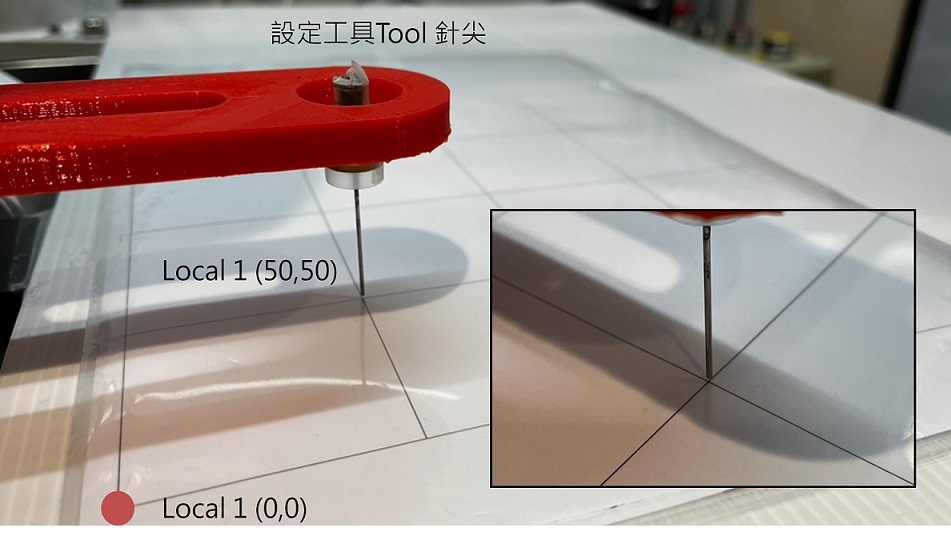
使用方法 1. 教导参考点
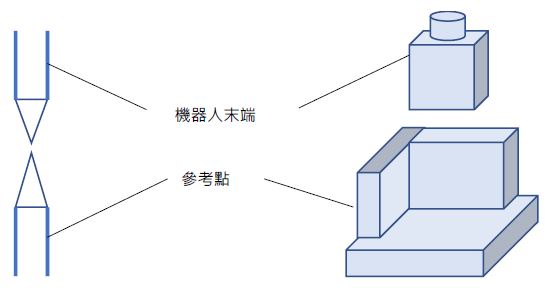
以尽可能精确的方式进行教学。例如,使用设备侧参考点和工具,如下图所示。
参考点:精确定位教导点
工具:精确定位末端
使用方法 2. 校正动作点
对所有的参考点进行教导后,请以AreaCorrectionSet 设定校正区域。将P1~P4 设
为参考点在绘图上的位置。将P11~P14 设为实际教导参考点后的点。在校正区域1
设定平面校正时,设定如下。
AreaCorrectionSet 1, P(1:4), P(11:14), MODE_PLANE
欲适用校正于校正区域内的动作点P20 时,可使用以下命令。
Go AreaCorrection(P20, 1)
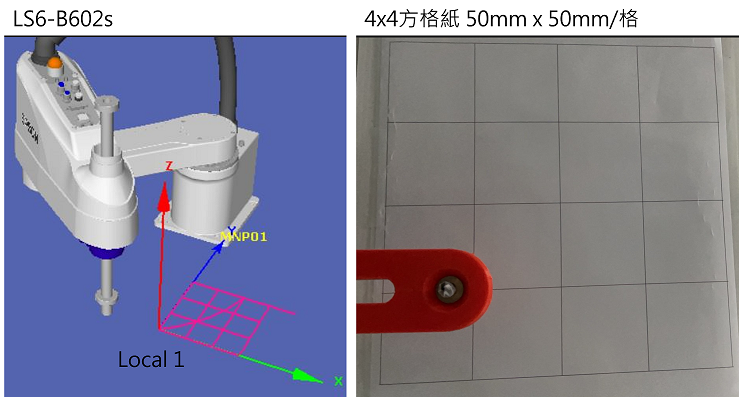
测试架构 与 程式范例 Sample code
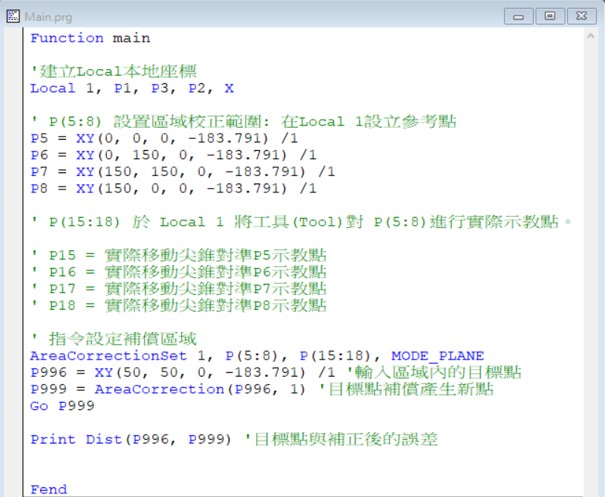
点数据中, P15 -18 为实际教导点
P 996 为移动目标点 (区域校正内的点)
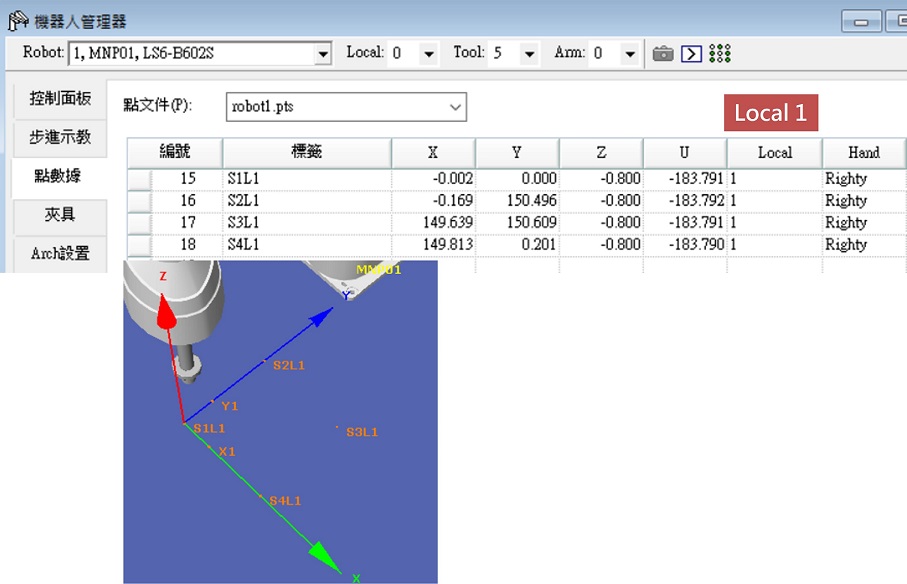
经过 区域校正后的点为 P999
实际移动至 P999
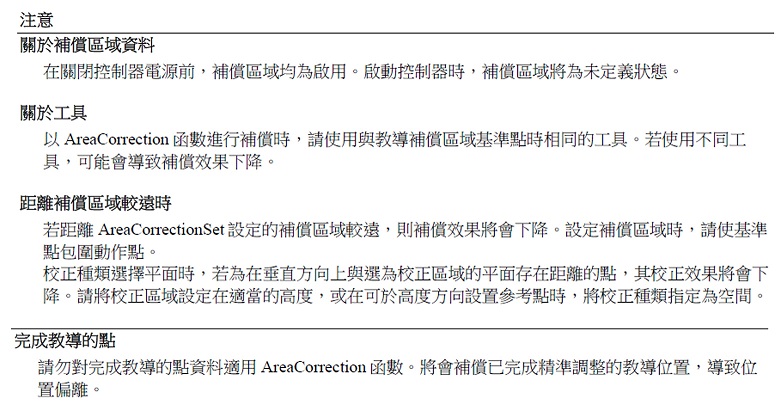
补充 功能使用注意事项
*更多机械手臂整合应用,请见 LinkTreeby@sacg_nbu
====================================================
参考资料:
EPSON RC+7.0
Brochures and Whitepapers
EPSON Global 官方推广站 https://epson.com/industrial-robots-factory-automation
EPSON Global 教育网 https://epsontaiwan.eletang.com.tw/?m=Homepage&c=Index&a=index
大联大品佳集团 EPSON Robot 代理产线 联系窗口
评论