

1. 方案特色
以往的机械手臂视觉搭配工业相机进行物料位置补正对位时,抓取的物料都会在相机的画面上停留一小段时间,经过视觉辨识位置后,再将物料放置到对应的收料区中;而EPSON支援的飞拍功能,则可以减少这段停留时间,快速的经过工业相机上方后直接放置物料,达到提升产能的效果。

2. EPSON飞拍介绍
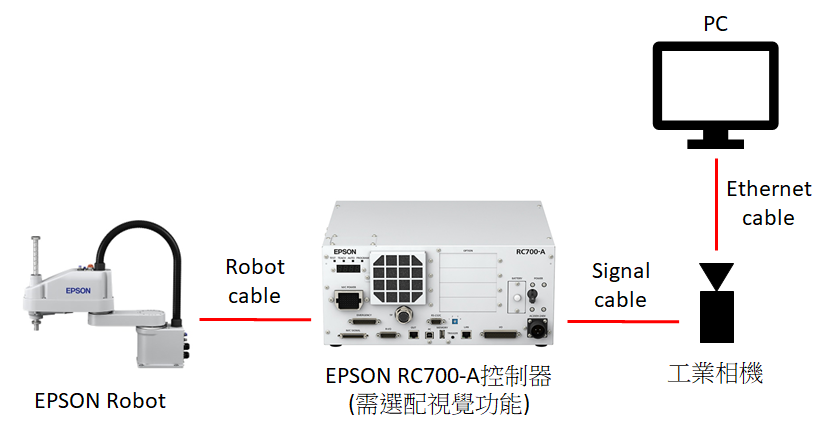
a. 硬体架构介绍:
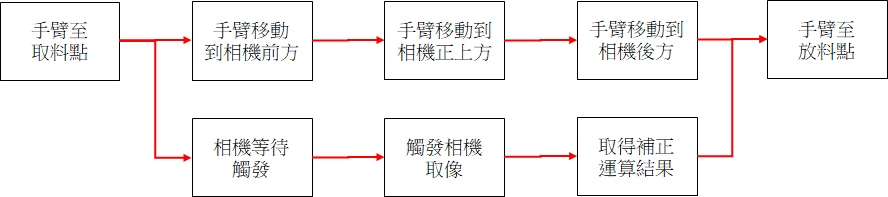
b. 软体动作流程:
c. 使用注意事项:
i. 因为工业相机需要高速抓取影像,故选择规格的时候需要选择取像速度高的型号,例如本次博文的验证案例选用60fps的相机
(一秒可以拍60张),取像速度太低会使影像模糊,使得视觉辨识失败。
评论