

1.前言
使用串口接收不定长数据时,可以有多种方法,比如最常见的有额外使能一个定时器,在超过定时范围未收到后续的字节时,认为此帧结束;或者利用IDLE中断,当数据空闲时,自动产生中断;亦或每接收到一个字节后都通过应用程序进行一次处理。这次我们介绍另外一种方法,在DMA方式下利用硬件接收超时中断(Receiver timeout interrupt)实现不定长数据的接收。
2.实现原理
首先,并非所有的STM32系列的MCU,也并非所有的USART/UART外设都支持Receiver timeout(RTO)特性,具体的支持情况,可以通过对应芯片的参考手册去查询。对于MCU的配置,可以通过USART_RTOR寄存器的RTOEN位使能接收超时功能,通过RTO位域配置超时时间,时间单位为传输一个数据位的时间(即波特率)。接收超时在停止位设置不同的情况下,计时的起始位置不同:
- 如果 stop = ' 00 '或 stop = ' 11 ',从停止位的末尾开始。
- 如果 stop = ' 10 ',则从第二个停止位的末尾开始。
- 如果 stop = ' 01 ',则从停止位的起始开始。
当计数超过 RTO 位域的设定值时,且使能了 RTOIE 位,就会产生一个错误中断,此时我 们就可以认为此帧结束,进而进行处理。
3.应用示例
HAL 库已经为我们提供了操作 RTO 相关的 API,应用开发过程,我们直接调用即可。
void HAL_UART_ReceiverTimeout_Config(UART_HandleTypeDef *huart, uint32_t TimeoutValue);
HAL_StatusTypeDef HAL_UART_EnableReceiverTimeout(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DisableReceiverTimeout(UART_HandleTypeDef *huart);
以STM32U575ZIT6为例,配置一个测试工程。
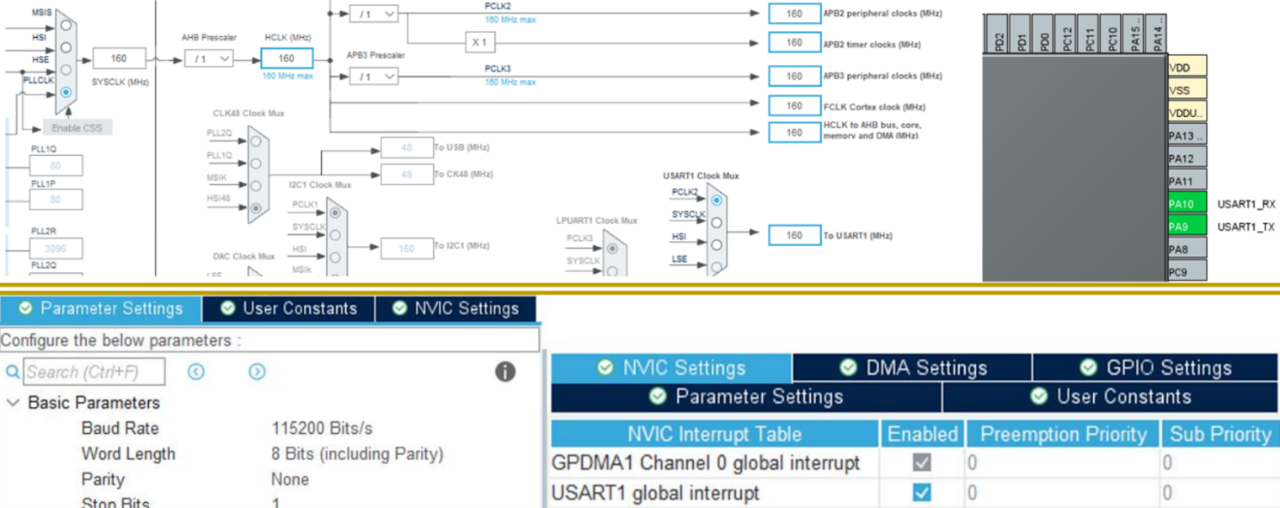
- 系统时钟配置为 160MHz
- 配置USART1为Asynchrones,管脚配置为 PA9,PA10
- USART1参数:115200bits/s,8bit,None,1Stop
- 使能USART1中断
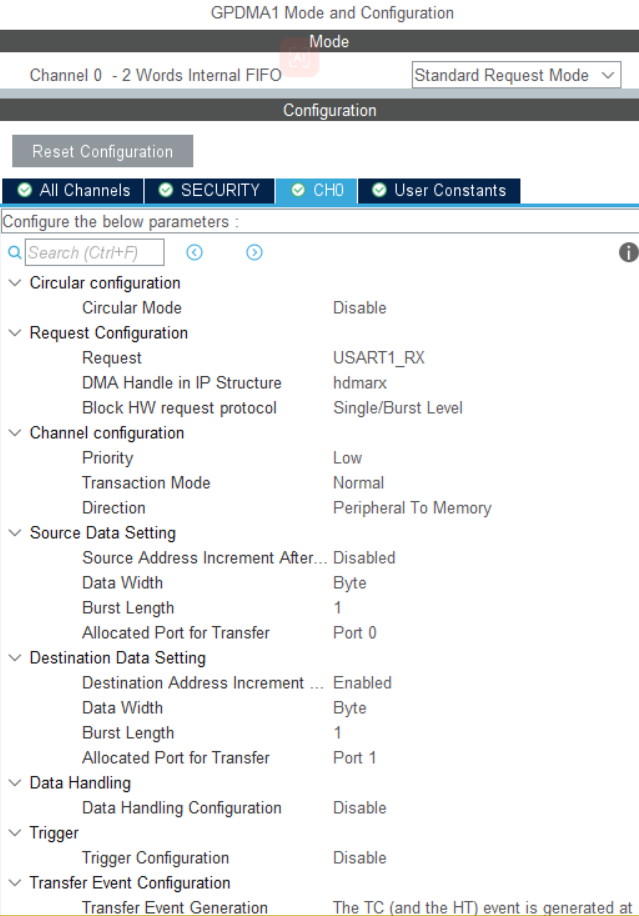
- 配置USART1_RX GPDMA
生成工程后,配置超时时间,使能接收超时功能,使能串口的DMA接收,处理串口的错误回调函数(接收超时后,HAL库中经HAL_UART_ErrorCallback()回调)。
/* USER CODE BEGIN 2 */
HAL_UART_ReceiverTimeout_Config(&huart1, huart1.Init.BaudRate/100); //10ms BaudRate = 115200
HAL_UART_EnableReceiverTimeout(&huart1);
HAL_UART_Receive_DMA(&huart1, Uart_RcvBuf, MAX_UART_RCV_LEN);
/* USER CODE END 2 */
#define MAX_UART_RCV_LEN 10 //config the max receive data length
uint8_t Uart_RcvBuf[MAX_UART_RCV_LEN];
uint16_t Uart_RcvLen;
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
/* Check if DMA mode is enabled in UART */
if (HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR))
{
if((huart->ErrorCode & HAL_UART_ERROR_RTO) == HAL_UART_ERROR_RTO)
{
uint16_t nb_remaining_rx_data = (uint16_t)
__HAL_DMA_GET_COUNTER(huart->hdmarx);
Uart_RcvLen = MAX_UART_RCV_LEN - nb_remaining_rx_data;
}
HAL_UART_Receive_DMA(&huart1, Uart_RcvBuf, MAX_UART_RCV_LEN);
}
}
}
HAL_UART_ErrorCallback 是一个支持所有错误中断的回调函数,在处理RTO错误引起的中断响应时,可以通过 ErrorCode 增加相应的判断。通过调用__HAL_DMA_GET_COUNTER(huart->hdmarx)可以得到DMA未搬移完的字节数,从而得到已搬移完成的字节数。
4.总结
利用RTO方式接收不定长串口数据,相比用定时器计时,可以节省一个硬件定时器资源,同时减少了定时器每次进入中断处理的运行时间;相比IDLE的方式,可以更灵活的配置超时时间。但需注意的是,所选用的MCU以及所使用的USART/UART是否支持这个特性要确认好。
评论