

一. 方案简介
基于 NXP NCJ29D5D UWB 的定位算法方案,利用三个 Anchor 可做到与 Key Fob 之间的范围定位,BCM 与 Anchor 间透过 CAN Bus 进行数据传送,由 MCU ( S32K144 ) 本身运行定位算法,演算 Key Fob相对的 XY 位置,更贴近客户的应用需求。
二. 方案产品照片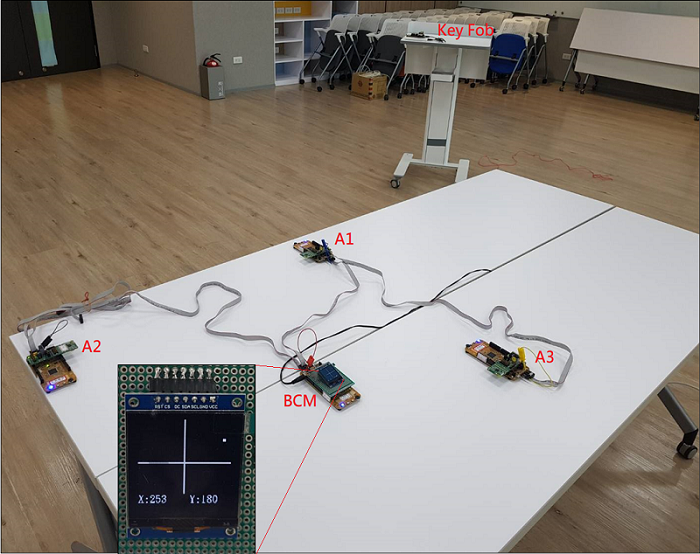
三. 软体设计流程与定位演算原理说明
1. 软体设计流程
如下为 UWB 定位流程框架与处理程序,分别是蓝色为 BCM、橘色为 Anchors 所进行的程序与资料处理 : 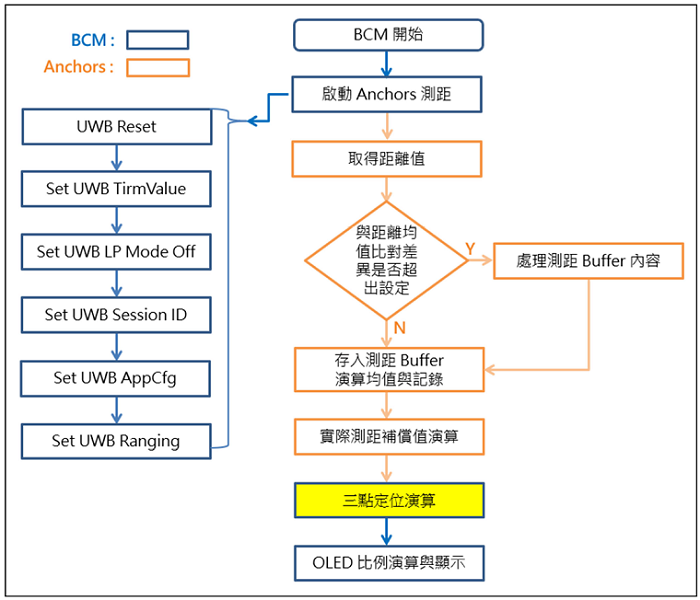
**提供大大通技术交流连结
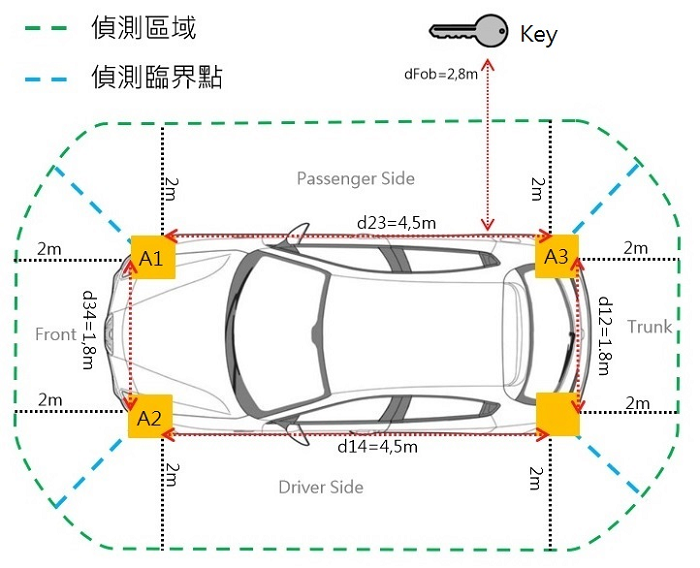
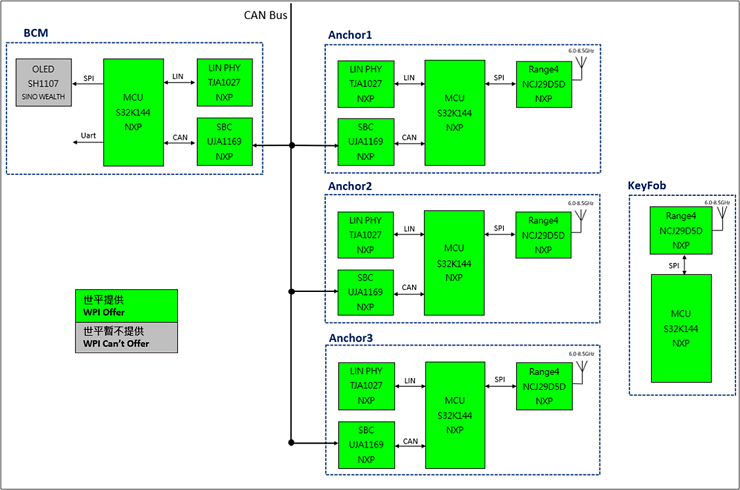
►场景应用图
►展示板照片
►方案方块图
►核心技术优势
ATU 提供技援 : • 提供 UWB 三点定位算法的样本软体 • 提供软体技术谘询
►方案规格
功能描述 : • BCM 上电后启动 Anchors 与 Key Fob 测距及定位演算 • 将 Key Fob 相对位置定位资讯在 OLED 上显示 方案特点 : • UWB 测距数据优化处理,及距离校正补偿 • BCM 透过 CAN Bus 取得 Anchors 测距资料与执行定位算法