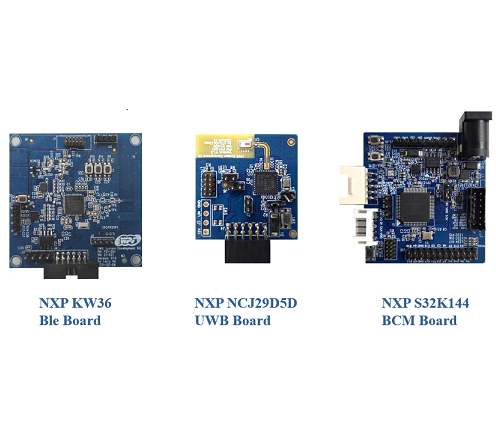
一、UWB 3D DEMO 介绍 1.1 概述 世平基于恩智浦 S32K144、NCJ2 9D5D 与KW38的 UWB 3D 定位方案,该方案遵循 3C 协议,UWB 具备更高的定位精度,以及更强的防中继能力。 UWB DEMO 利用双边双距测距方式对钥匙进行测距,距离数据传输至 BCM 处理,结
ROS 简介 ROS顾名思义,就是机器人操作系统(Robot Operating System)的英文缩写,是用于编写机器人软件程序的一种可自由调配的软件框架,它提供了操作系统应有的服务,包含底层硬件设备控制、大量的工具软件、程式代码和协议等,目的为简化在于各种机器人平台上创建复杂而强大的机器人行为
1.1 研发背景: 随着汽车工业及计算机视觉技术的发展,为了提高驾驶的安全系数,越来越多的技术被应用到汽车电子领域,传统的倒车影像系统只能覆盖车尾周围有限区域,而车辆的两侧及车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的路段及复杂的停车环境容易引发碰撞、刮擦等交通意外,甚至因为驾驶员视觉盲区导致后
为提供您更多优质的内容,本网站使用 cookies 分析技术。若继续阅览本网站内容,即表示您同意我们使用 cookies,若不同意请关闭浏览器的 cookie 功能,关于更多资讯请阅读 Cookie 政策平台服务条款