

BLDC无刷电机,顾名思义就是没有电刷的电机,因为没有电刷,无刷电机在运行过程中噪音小,也不存在电刷损坏的情况。 BLDC 由于其高效率、长寿命、低噪音、易于维护等特点,正在逐渐替代有刷电机,今天就给大家介绍一下 BLDC 及 BLDC 的驱动架构。
一. BLDC 介绍
BLDC 无刷电机结构如图 1 所示,BLDC 由定子和转子组成。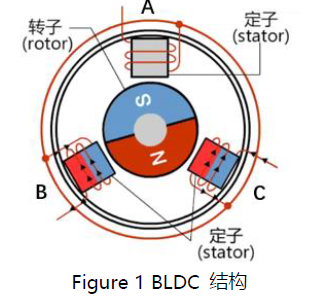
BLDC 的定子由线圈组成,由高中知识我们知道通电线圈附近可以产生磁场,磁场方向由电流方向决定,如图 2 所示,因此我们只需要改变线圈电流方向,就可以改变线圈产生的磁场方向。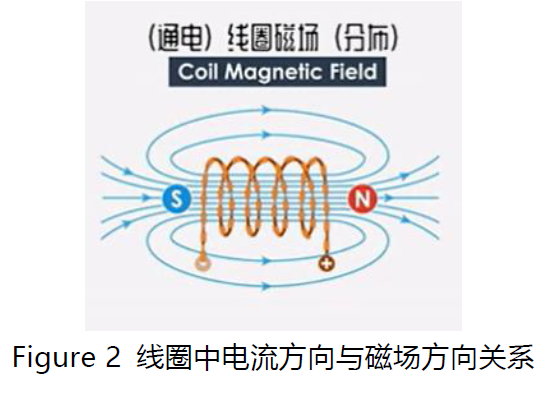
BLDC 的转子由永磁体组成,利用同性相斥,异性相吸的原理,通过给定子通电产生相应方向的磁场,就可以让转子转动起来,具体过程如图 3 所示。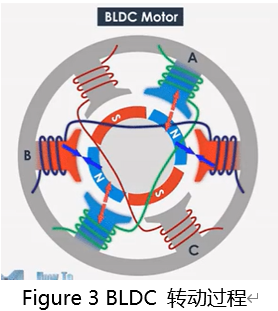
实际应用中为了控制方便,通常会将 ABC 三个绕组连接在一起,形成一个星型连接,如图4 所示,这样子只需引出三根线就可以对电机进行控制。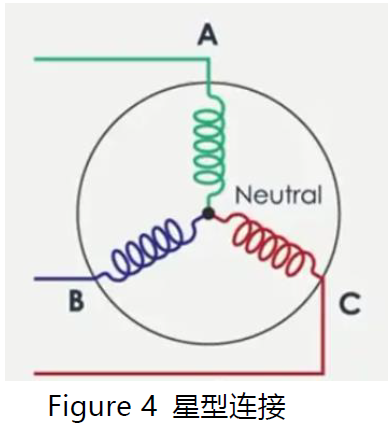
如图 5 所示,A 接电源正极,C 接电源负极,这样就可以实现 AC 两相上电流方向相反,产生的磁极也相反,吸引转子逆时针旋转。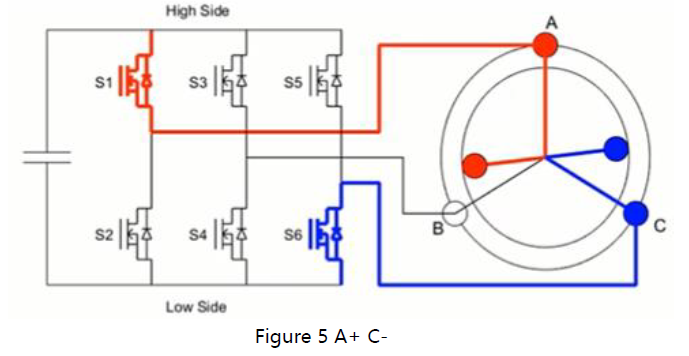
当转子 S 极靠近 A,电路进行换相,B 接电源正极,C 接电源负极,吸引转子继续旋转。以此类推,只需要按照 AC-BC-BA-CA-CB-AB 的顺序依次通电,就可实现转子旋转 360°,循环通电,就可以实现转子持续旋转。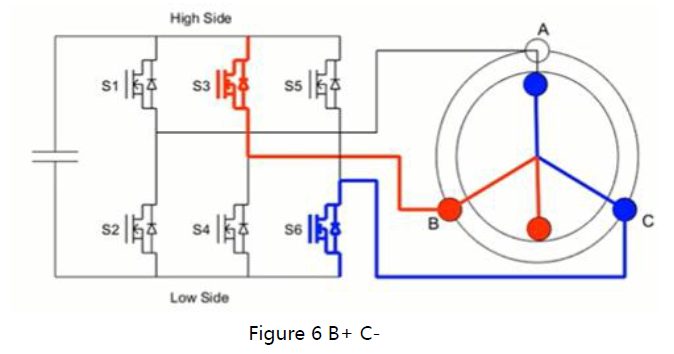
二. 转子位置检测
在 BLDC 的转动过程中,我们需要知道转子转到哪里了,才能决定给 A/B/C哪两相通电。检测转子位置一般有两种办法:
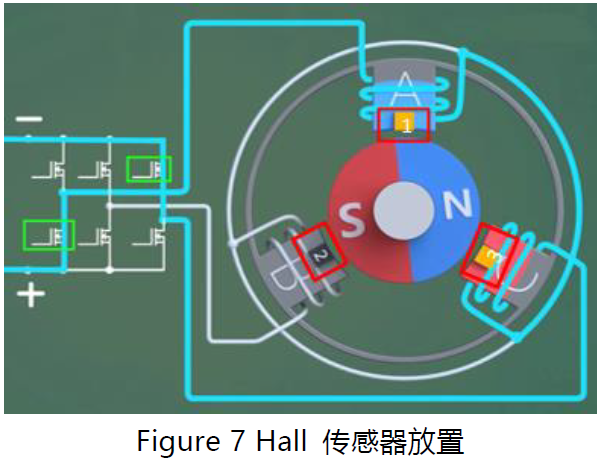
1. 霍尔传感器检测法:如图 7,一般在定子上放上三个霍尔传感器,通过霍尔传感器检测转子位置:当 N 极靠近霍尔传感器时输出 1,S 极靠近霍尔传感器时输出 0。
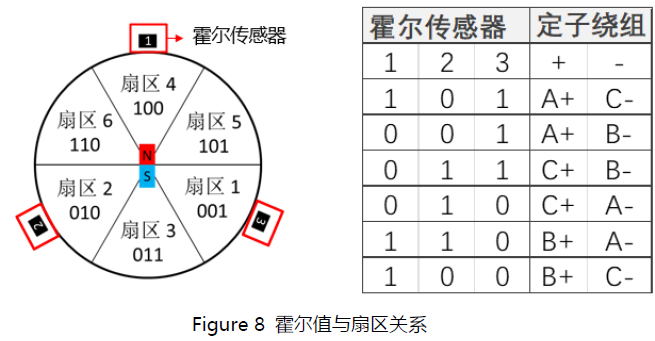
三个霍尔值组成 6 种组合,不同的霍尔值代表不同的扇区,每个扇区 60°,转子每转过 60° 就需要进行换相,如图 8 所示。控制器通过霍尔传感器的值判断转子在哪个扇区,根据表格给相应定子通电。图中转子处于扇区 4,霍尔值为 100,根据表格此时需将 B相连接电源正极,C相连接电源负极(顺时针旋转的情况下)。
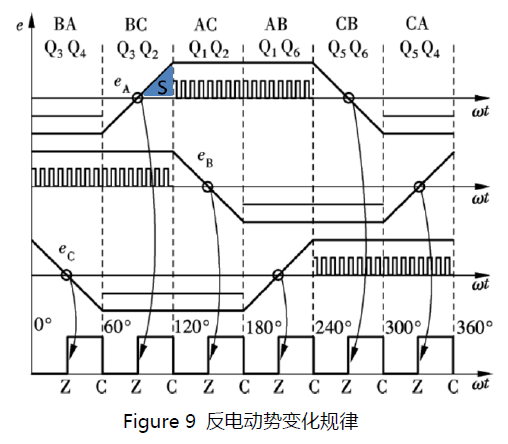
2. 反电动势检测法(无感):当线圈周围的磁场(磁通量)改变时,线圈上会产生反电动势,定子上反电动势变化如图 9 所示,Z 是反电动势过零点,C 是换相点,由图可知 C点滞后 Z 点 30°,Z 点与 C 点之间有一个面积为 S 的三角形,每个电机的 S值是固定的。当控制器检测到反电势过零点,开始对反电动势进行积分,当积分值等于 S 时,说明到达换相点,在一个电周期 360° 中一共有 6 次换相点。
无论采用霍尔传感器检测法还是反电动势检测法,一个电周期中都需要经过六次换相,也成为六步换相。在六步换相方式下,电机的相电压接近方波,如图 10 所示,所以称为方波控制。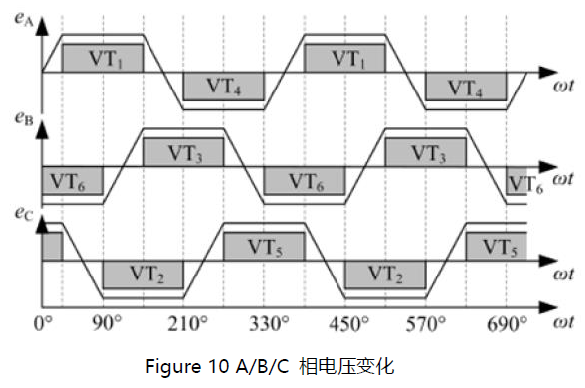
三.具体控制过程
本文将对 BLDC 无感方波驱动架构进行介绍,框图 11 所示。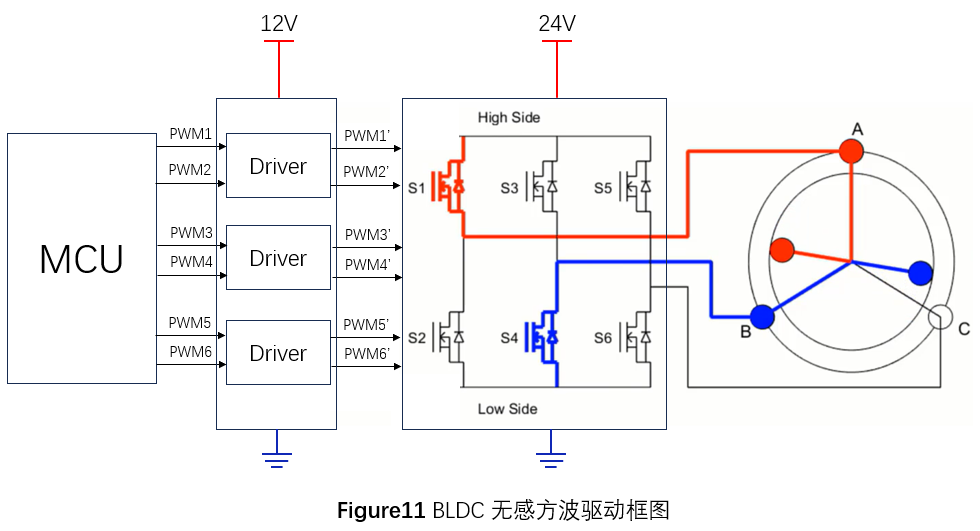
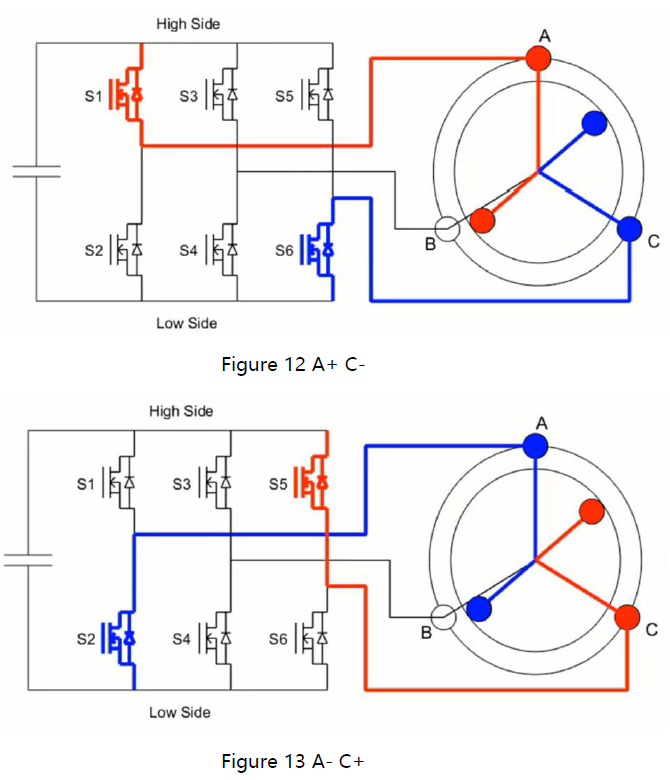
1. MCU 通过 PWM 控制 MOS 管的通断,从而控制电路中电流大小和方向。如图 12 所示,假设 S1,S6 导通,此时电路中的电流流向为:电源正极 → S1 → A → C → S6 → 电源负极,这个时候 AC 通电,B 相浮空。如图 13 所示,假设 S5,S2 导通,此时电路电流方向相反。同时 MCU 可以增大 PWM 占空比来改变 MOS 的导通时间,从而控制电路中的电压大小,进而控制电机转速(电路中电压大小决定电流大小,电流大小决定转速大小)。
 2. Gate Driver 主要作用:由于 MCU IO 口的输出电压最大只有3V,而 MOS 完全导通的电压需要在 10V-15V 之间,因此需要 Gate Driver 的帮助,Gate Driver 可以放大 MCU 输出的 PWM 的幅值,给 MOS 管 栅极提供更大的电压,提高 MOS 管的开关速度。
2. Gate Driver 主要作用:由于 MCU IO 口的输出电压最大只有3V,而 MOS 完全导通的电压需要在 10V-15V 之间,因此需要 Gate Driver 的帮助,Gate Driver 可以放大 MCU 输出的 PWM 的幅值,给 MOS 管 栅极提供更大的电压,提高 MOS 管的开关速度。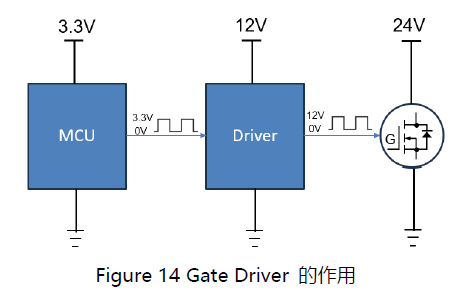
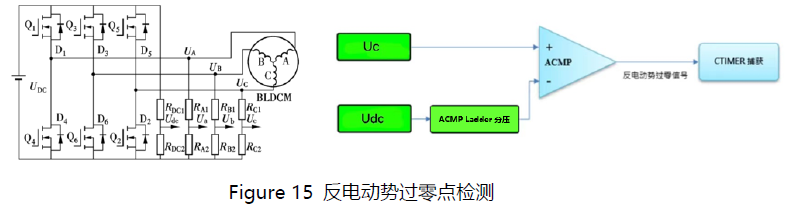
3. 反电动势过零点检测:假设 C 相开路,该相上的电压经过分压后得到 Uc,母线电压分压后得到 Udc,此时Uc = 1/2 Udc + 3/2 eC ,当 eC = 0 时,Uc = 1/2 Udc,MCU 采集 Uc 和 Udc 后,将 Uc 连接到 MCU 内部ACMP 的正端,Udc经过 ACMP 内部的阶梯分压后连接到 ACMP 的负端,当两个信号相等时 ACMP 产生反电动势过零信号,触发 CTIMER 捕获,具体如图 15 所示,同时 MCU 进行反电势积分,当积分值达到特定阈值时,进行换相。
4. 速度计算:MCU 通过定时器捕获两次反电动势过零点时刻,进行电机转速计算:v = (sysclock * 10)/value, sysclock 是 MCU 时钟频率,value 是两次过零点时间间隔。
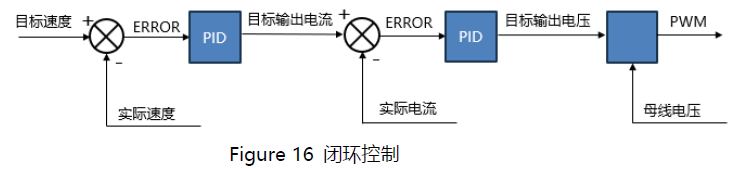
5. 闭环控制:MCU 通过计算得到的实际速度后对电路电压进行调整,进而控制电机速度,具体过程如下:
- 将目标速度与实际速度相比后,通过 PID 算法进行误差修正,计算实际应当输出的电流,即目标输出电流。
- 将实际电流与目标电流相比后,通过 PID 算法进行误差修正,计算实际应当输出的电压,即目标输出电压。
- 输出电压 = PWM 占空比 * 母线电压,电机负载变化、电源纹波、电路阻抗等原因都会导致母线电压波动,母线电压无法调整,因此改变 PWM 占空比来实现输出目标电压。
以上就是 BLDC 无感方波驱动的整体逻辑,如有疑问可以在评论区留言~
四.BLDC 驱动方案推荐
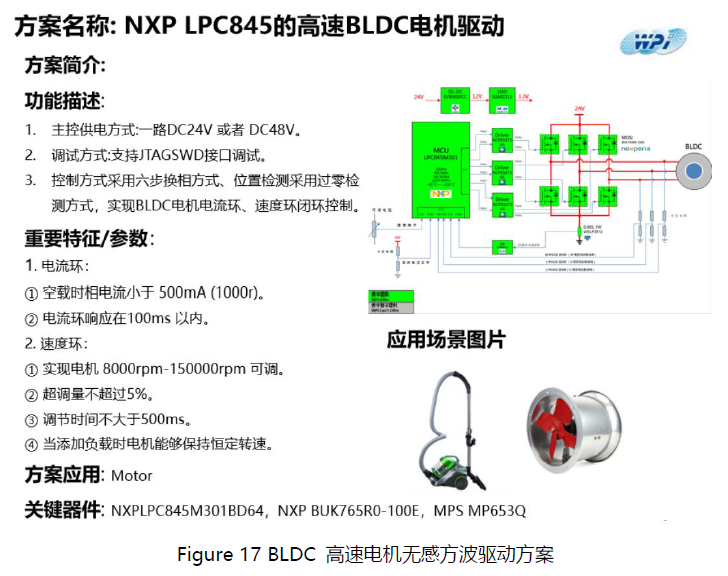
世平集团也针对无刷电机推出了一个 BLDC 高速电机无感方波驱动方案,适用于负载较轻,成本较低的吸尘器、风机等应用,具体参数如下。
评论